
擼偺巇慻傒傪帩偮抦擻憰抲
| 丂抦擻偺婲尮偼摦暔偺妶摦傪慻怐偡傞巇慻傒偱偁傞丅
摦暔偺帇妎偵傛傞峴摦偺惂屼偼捈姶揑偱偁傞
丅偦偺惂屼偼奐儖乕僾惂屼偲尵偊傞傕偺偱丄抐懕揑偵庢傝崬傫偩僨乕僞偵偮偄偰崗堦崗偲恦懍偵摿挜傪拪弌偟偰偦傟傜傪慻傒崌傢偣偰忬嫷傪敾抐偟偰幚悽奅偺曄壔偵懳張偟偰偄傞丅
僸僩偺擼恄宱宯偱偼姶妎婍偐傜摼偨庬乆偺忣曬傪慻傒崌傢偣偰恦懍偵張棟偟偰妶摦傪幚悽奅偺曄壔偵懳張偡傞傛偆偵偟偰偄傞丅
帺摦幵偺柍恖塣揮偱偼僙儞僒乕偱奜奅偐傜抐懕揑偵嵦庢偝傟傞僨乕僞偵婎偯偄偰懳張偡傞奐儖乕僾惂屼偺曽幃偺巇慻傒偑桳岠偱偁傞丅(2020擭3寧2擔峏怴)
|
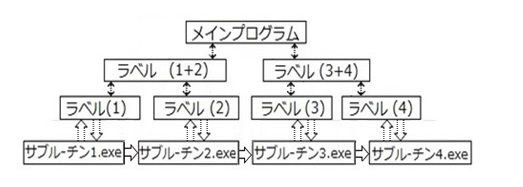
[僀儞僷儖僗忬偺惓揹埵傪揮憲偟偰妶摦傪惂屼偡傞擼恄宱夞楬偺儌僨儖]
[擼偺巇慻傒傪帩偮抦擻憰抲偵娭偡傞暥專(PDF僼傽僀儖乯]
|
[2020-1Jp]丂搨郪怣巌, "抦擻宍惉偺榑棟夞楬偵傛傞棟夝:", 揹巕忣曬捠怣妛夛
怣妛媄曬, 僯儏乕儘僐儞僺儏乗僥傿儞僌尋媶夛, 2020 擭3寧4-6擔, 敪昞斣崋NC-40,
揹婥捠怣戝妛乮怴宆僐儘僫僂僀儖僗姶愼徢懳嶔偵傛傝岥摢敪昞偼拞巭), 2020. [JM1] 搨郪怣巌, "堄幆偺巇慻傒傪帩偮忣曬張棟憰抲偺傾乕僉僥僋僠儍" 丂乕 擼偺巇慻傒傪岺妛偡傞儃僩儉傾僢僾偺傾僾儘乕僠 乕, 揹巕忣曬捠怣妛夛 捠怣峴摦岺妛帪媶愱栧埾堳夛(CBE) 戞俈夞尋媶夛, pp.1-8, 庱搒戝妛搶嫗廐梩尨僒僥儔僀僩僉儍儞僷僗, 2014擭10寧30擔. [JM2], [pptJM2] 搨郪怣巌, "奒憌忬偱栐忬偺徾挜孮偵傛傞儘儃僢僩偺惂屼", 揹巕忣曬捠怣妛夛, 2014擭憤崌戝夛, 怴妰戝妛丂3寧19擔丄島墘斣崋D-8-6,丂2014. [EM2], [pptEM2], S. Karasawa, "Layered Network of Representatives for Control of Robot", Proceedings of the 2014 International Conference on Electrical, Control and Automation, pp.745-747, DEStech Publications .Inc. February 22-23, Shanghai, China, 2014 [M3] 搨郪怣巌, "妶摦扨埵傪揮憲偟偰3師尦嬻娫偵妶摦傪慻怐偡傞擼恄宱夞楬栐儌僨儖", 怣妛媄曬, MBE2004-52, 1-4儁乕僕, 2004擭11寧. [M4] S. Karasawa, "Dynamic MOS circuit for neuromorphic hardware implementation based on the paradigm of activity", International Conference on Computing, Communications and Control Technologies, Vol. 5, Hardware design for computers and communications, pp.194-199, Austin, Texas, August14-17, 2004. [M5] 搨郪怣巌, "妶摦扨埵傪揹壸偱揮憲偟偰擼恄宱夞楬偺婡擻傪幚尰偡傞夞楬栐偺峔抸朄", 怣妛媄曬, NC2004-2, 7-12儁乕僕, 2004擭俆寧. |
[娭學偡傞摿嫋]
| [1] 摿婅2006-357183崋丂乽棧嶶僂僃乕僽儗僢僩曄姺傪梡偄偨僥儞僾儗乕僩 儅僢僠儞僌偵傛傞壒惡擣幆乿 [2] 摿嫋戞4161058崋丂摿婅2005-166673丂乽彂偒崬傒壜擻宆憃曽岦榑棟夞楬乿 [3]摿嫋戞3496065崋丂摿婅2000-179115乽僀儞僷儖僗揹巕憰抲乿 p1p2p3p4p5 |

