メカ積み、リンケージ
CZERO-6 メカ積み-1
モーターは Turnigyの L−5055B (KV600)を使用
しました。 T君のお勧めで、このクラスの機体にはピッタリだ
そうです。 ペラは 14×7、もしくは 13×6.5 が合うよう
です。 重量配分ではもっと重たいモーターでもいけそう
ですが、パワー的には充分です。
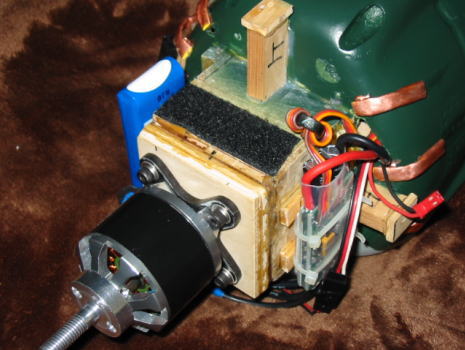
モーターマウントは 4mmベニヤの二重でしっかり作ります。
このマウント自体に2度くらいのサイドスラストを付けておき
ます。 ダウンはほとんど付けていませんが、 飛ばしてみて
調整したいと思います。
モーターマウントの右側には受信器用電源として、
2セル1000mAhのLipoをマジックテープで取り付けて
います。
一日に何回も飛ばすことばないと思うので、この容量で
充分でしょう。 重心をもっと前にしたければ、1300位
は積める余裕はあります。
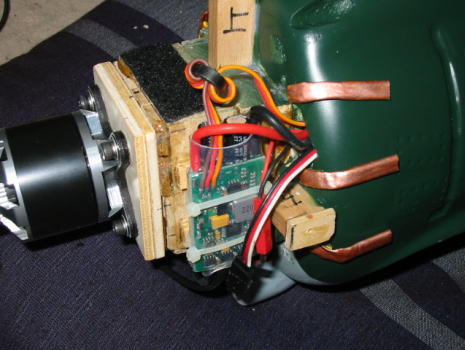
マウント左側にはアンプを取付けますが、ゲタを履かせて
空間を作り、放熱対策をしておきます。 インシュロックで
とめています。
コード類は防火壁の端の方から胴体内へ引込みます。
マウントの下側にはUBECを取り付けています。
消費電流からすれば、アンプのBEC出力で十分間に
合うと思いますが、別電源の方が安心できます。
UBECへの電源供給は受信機用バッテリーとモーター用の
メインバッテリーと、どちらでも対応できるように入力コネク
ターは分岐させています。
(通常は別電源にしますが、トラブル等も考え、保険として
います。)
カウリング内の全体の様子。
マウント上部は何もなく空いていますが、ケツ重になったら、
いろいろ対応できるようにしておきます。
カウリングをはずさずに受信機用バッテリーを充電できる
様に、スイッチとBECコネクターを付けました。 バッテ
リーのバランス端子もカウリングの横から出せる様にして
います。