潤滑油が溜るようピストンにミゾを切る
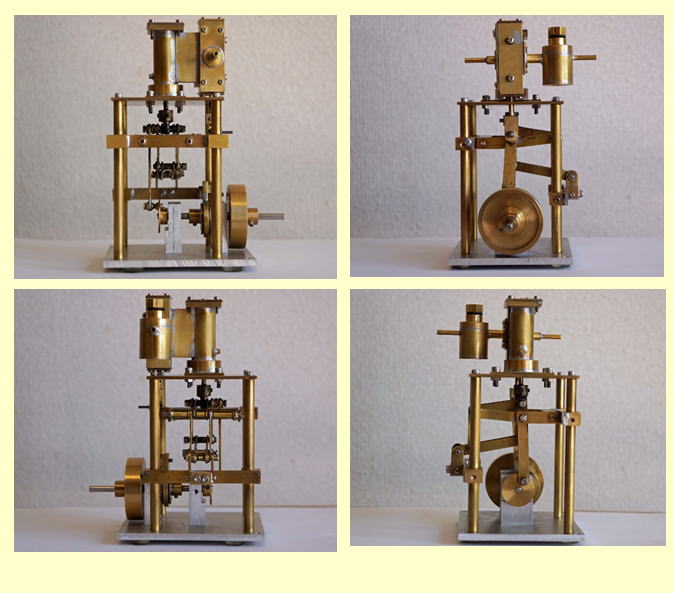
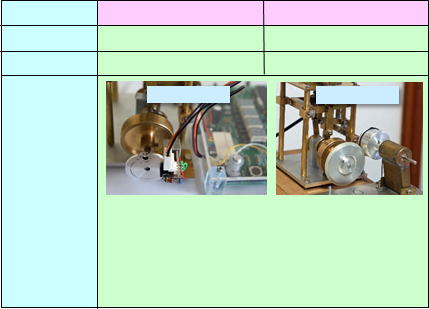
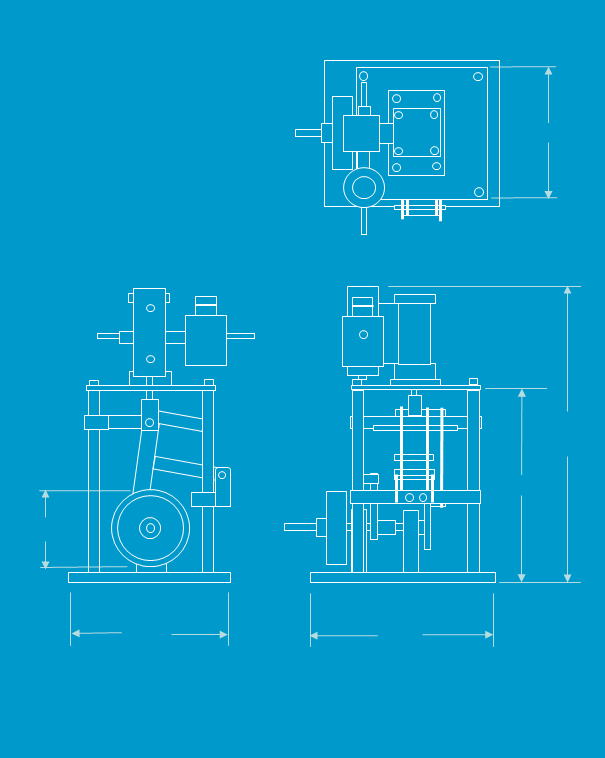
完成した蒸気エンジン#10とベースとなった一般的蒸気エンジン#7の比較を図10に示します。 外形的には#10は平行四辺形機構を実装する分、高さ、横方向に2割ほど大きくなっています。 問題の性能ですが、回転数は#10では1430rpmとリンク機構の可動部分の影響で、6%程低下しています。 トルクについてはかなりいい加減な測定ですが、360cm・g(無負荷運転で4mmの回転軸を指で止められない回転力)を示し、同じ平行四辺形機構を使った蒸気エンジン#9と同様、私の作成したエンジンの中では最大級のトルクを記録しました。
蒸気エンジン#10の動きを動画でご覧ください
バルブピストン接続部
ピストン長を調整
偏芯カム部分
4mm
4mm
#7エンジンにこの部分を追加
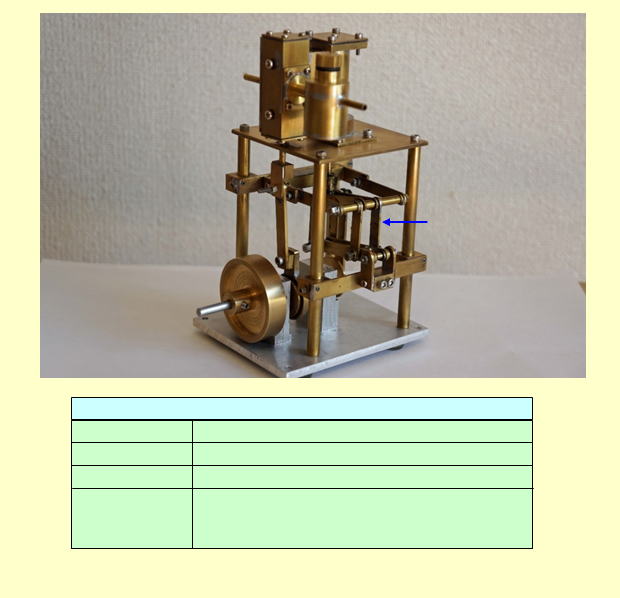
前回のピストンの直線運動を回転運動に変換する「ワットの平行四辺形リンク」を使用したビーム蒸気エンジン#9では予想以上のトルクが得られたことから、今回はオーソドックスな蒸気エンジン#7に平行四辺形機構を実装したコンパクトな高トルクなエンジン製作にチャレンジします。 作成するエンジンは基本となるシリンダー構成、シリンダーサイズ、バルブ制御等の方式は#7と同じ仕様でコンロッド部にこのリンク機構を付加した形とします。 出来上がった蒸気エンジン#10の外観と仕様を図1に、概要図面を図2に示します。
参考に一般的な蒸気エンジン#7の動きは下記動画でご覧ください。
完成した蒸気エンジン#10の動き下記動画でご覧ください。 ミニコンプレッサを使って運転している様子です。
296g・cm
360g・cm
1523回転/分
1430回転/分
蒸気エンジン#7
蒸気エンジン#10

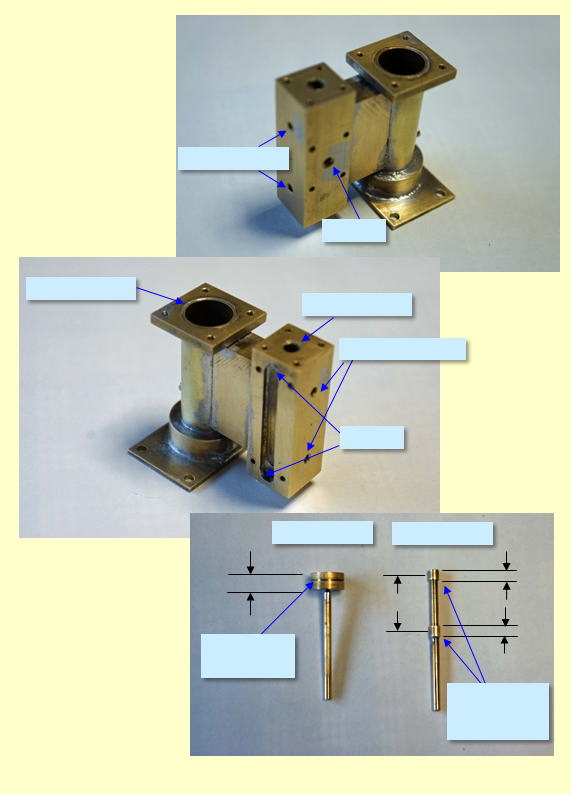
偏芯カム組立て後
回転軸
B
A
18mm
はんだ付け
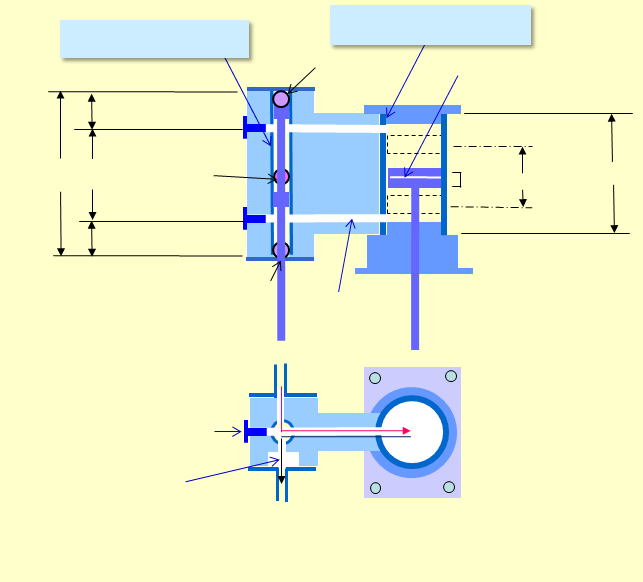
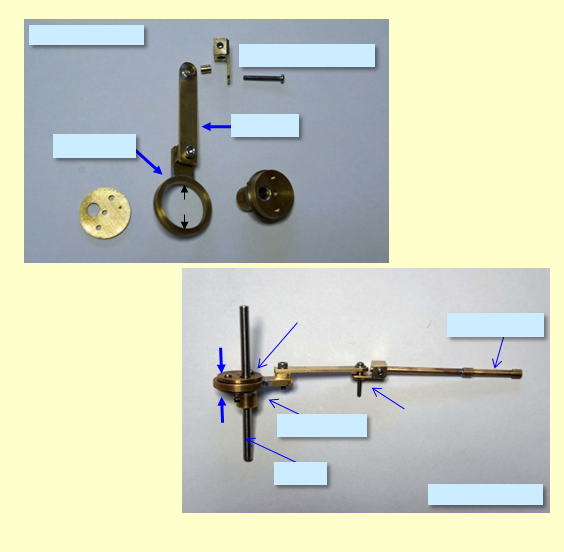
バルブ制御のリンク機構についても#7蒸気エンジンと同様です。 図7にピストンバルブリンク機構の構造を示します。 また、パワーピストンとバルブピストンの位相調整は一般的な蒸気エンジンと変わりません。すなわち、パワーピストンの動きはバルブピストンの動きより回転方向に90度先行しています。 具体的な調整方法として、パワーピストンを上死点の位置にしておき、バルブピストンが中間位置(バルブが給気穴と排気穴を塞ぐ位置)にくるようにコンロッドの位置、長さ、バルブ偏芯カムの角度を設定します。
外径4mm
内径3mmパイプ
を利用
23mm
4mm
潤滑油が溜る
0.8mmのミゾ
6.5mm
13mm
パワーピストン
バルブピストン
給排気通路ドリル穴
バルブシリンダー
パワーシリンダー
上下の排気穴から排気する
為のミゾ(フライス加工)
給排気通路ドリル穴
は完成後ネジで塞ぐ
給気口
バルブ中間位置
給気穴
バルブ中間位置
パワーシリンダー
外形15mm、内径13mmパイプ
エンジンヘッド作成
平行四辺形部 実装
クランクピン
ピストン軸
コンロッド
平行四辺形部 部品
ヨーク
ヨーク
支点A
支点B(フレームに固定)
クランクピン
コンロッド
支点A
上死点位置
ワット平行四辺形機構
この成分がシリンダーにかかる
蒸気エンジン#10
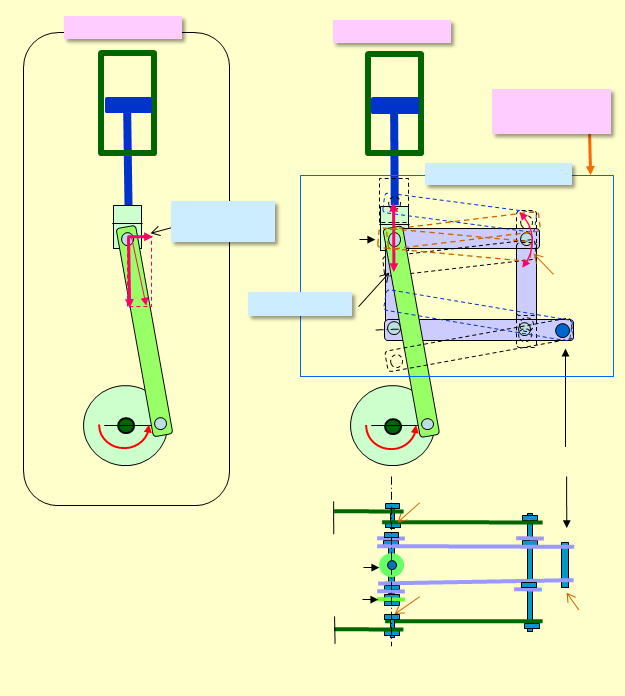
一般的な蒸気エンジン(蒸気エンジン#7 )における直線運動と回転運動変換機構では図3に示すようにクランクピンからコンロッドを介してピストン軸に接続されます。 この形態では、ピストンとの接続点における力は図3の赤矢印に示す力がシリンダに垂直な摩擦力としてかかることになり、運動の妨げとります。 「ワットの平行四辺形リンク」は直線運動(近似的)を回転運動に変換するリンク機構ですが、この仕組みを組入れることでシリンダーにおける垂直方向の力は発生しない為、効率的なエンジンを構成することが出来ます。 図3には、今回実装したリンク機構の構成を示します。 なお、ワットの平行四辺形機構の動きについてはこちらをご覧ください。
ワットの平行四辺形機構の仕組
「オーソドックスな蒸気エンジン#7」にワット平行四辺形機構を実装。 参考に蒸気エンジン#7はこちらをご覧ください
コンロッド(下部でクランクピンに接続)
(上部からみた図)
支点B
蒸気エンジン#10 運転の様子です
クリックすると動画サイトにジャンプします
蒸気エンジン#7 運転の様子です
クリックすると動画サイトにジャンプします

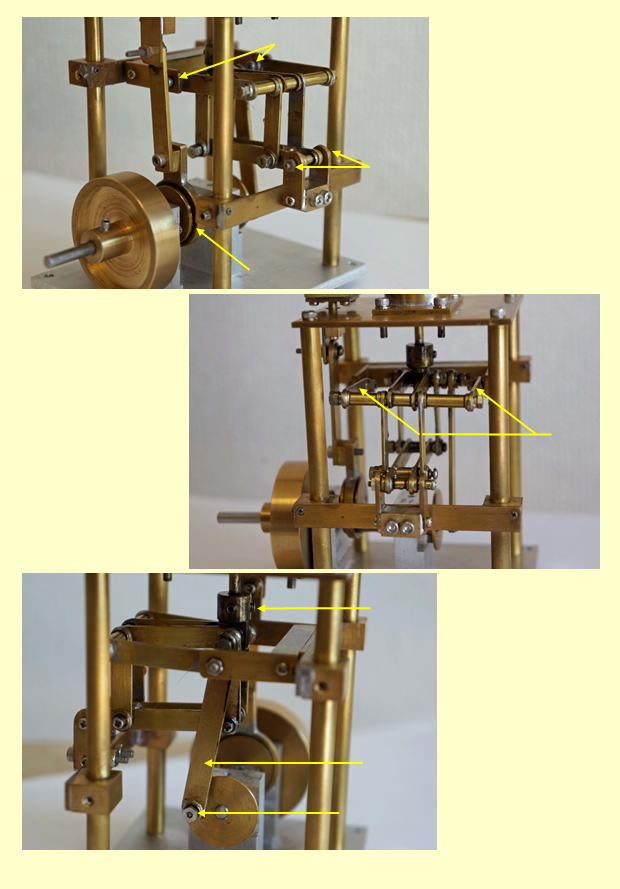
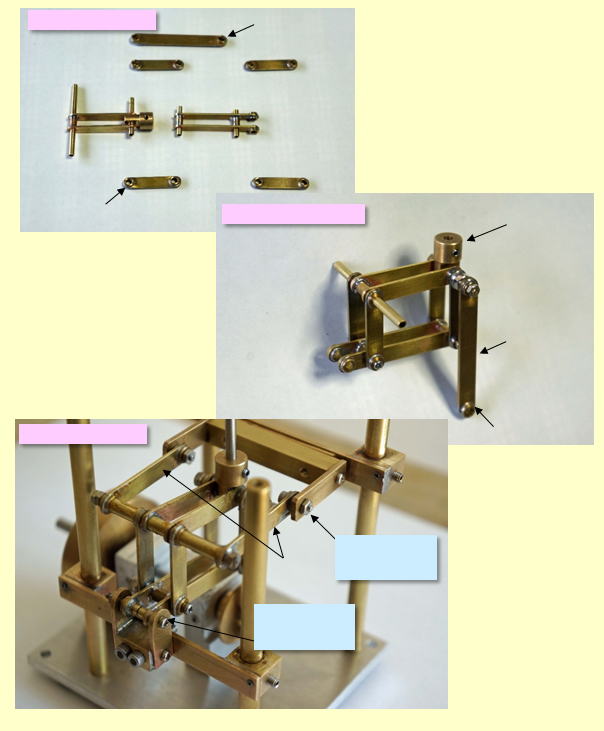
平行四辺形のロッドは厚さ1mm、幅6mmの真鍮板で両端に3mmの軸受けがはんだ付けされています。 この軸は3mm真鍮パイプでパイプ内部を2mmビスを通して両端を止め、平行四辺形の頂点を形成しています。 この機構ではピストンの位置に応じて平行四辺形が変形しますが、スムースに変形する為には4つの頂点となる可動軸を正確にあけることがポイントとなります。 図4に平行四辺形機構の作成の様子を示します。
平行四辺形機構の動きについてはこちら(並行四辺形リンク機構の動き)をご覧ください。・エンジンの駆動は同じコンプレッサーを使用(圧力計の表示は0.08MPaを表示)

蒸気エンジン#7
蒸気エンジン#10
製作結果
平行四辺形機構の実装
バルブピストン
AとBで挟んでネジ止め
B
A
コンロッド
ピストン軸接続部
偏芯カム構成部品
バルブ制御リンク機構
排気口
吸気口
最後にネジで塞ぐ
図5 エンジンヘッド断面の様子
排気口
排気穴
排気穴
バルブシリンダー
外形5mm、内径4mmパイプ
基本となるシリンダー構造、ボア/ストロークのサイズは#7と同じとします。内部構成と作成過程はいつもと同様で、作成過程の詳細はこちらを参照下さい。今回の概要を図5、図6に示します。 エンジンヘッドの内部構成を図5に、完成した外観を図6に示します。
支点B
フレームに固定
ヨーク
支点A
フレームに固定
コンロッド
平行四辺形部 組立て
軸受け
ピストン軸(上下する)
フレームに固定
支点A
支点B
ヨークの動き
近似直線運動動
下死点位置
クランクピン
蒸気エンジン#7
ビーム蒸気機関リンク機構にワット平行四辺形機構を使用
