
直線運動を回転運動に変換する「ワットの平行四辺形機構」の動きに関して、Web情報では理解出来ない部分があり、木を使って簡易的なモデルを作成し動きを体感してみました。
図1は作成した一般的なモデル、図2は平行四辺形機構を実装したモデルです。一般的なモデルではピストン軸に図に示す方向に力がかかる為、図に示すガイドが無ければスムーズに動きません。一方、平行四辺形機構を図2のように実装することでピストン軸は直線運動となり、図1のようなガイドは無くてもスムーズに動作することが確認出来ました。このモデルを基に蒸気エンジンに組込むリンク機構を作成しました。
バルブシリンダ軸平行四辺形機構
は未実装
パワーシリンダ軸
平行四辺形機構
を実装

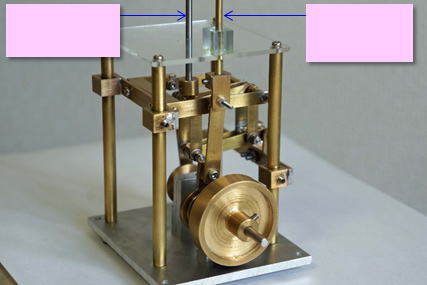
蒸気エンジン#10ではパワーシリンダーとバルブシリンダーの2か所に直線運動と回転運動との変換機構が必要ですが力のかかるパワーシリンダーに平行四辺形機構を実装しています。 なお、弁制御は通常のリンク機構としています。図4は平行四辺形機構の動きが分かるように機構部のみ実装した途中段階の様子です。 下記動画サイトは直線運動(近似)と回転運動変換機構の動きがわかるよう、エンジン回転軸をモータで低速回転させています。
リンク機構の動きを動画でご覧ください
蒸気エンジン実装
ヨーク
ヨーク支点
支点
平行四辺形
実験モデル
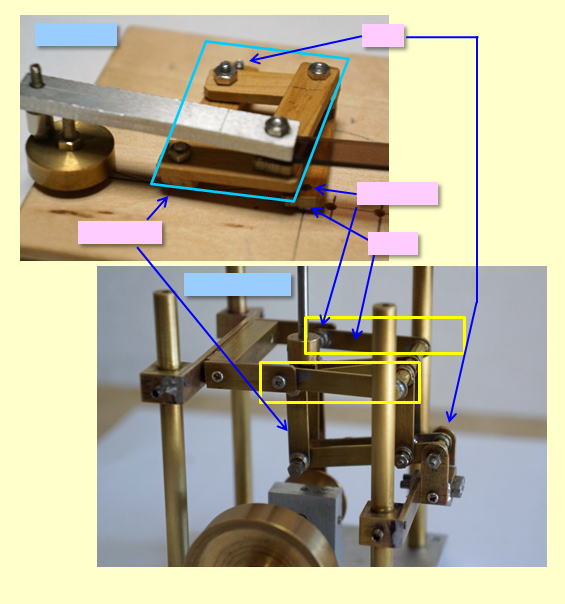
実験した平面的簡易モデルと実際に蒸気エンジンに実装するリンク機構への対応を図3に示します。
蒸気エンジンへの平行四辺形機構実装
図2 平行四辺形を実装した蒸気エンジンモデル
抑制ヨークを介して平行四辺形
を支える
ヨーク支点A
平行四辺形
支点B
ピストン軸に垂直方向の力がかかる為、ガイドが必要となる。
図4 リンク機構を実装した蒸気エンジン#10
摩擦力
シリンダ
力を受けるガイド
ピストン軸
図3 平行四辺形機構のモデルと実機の対応
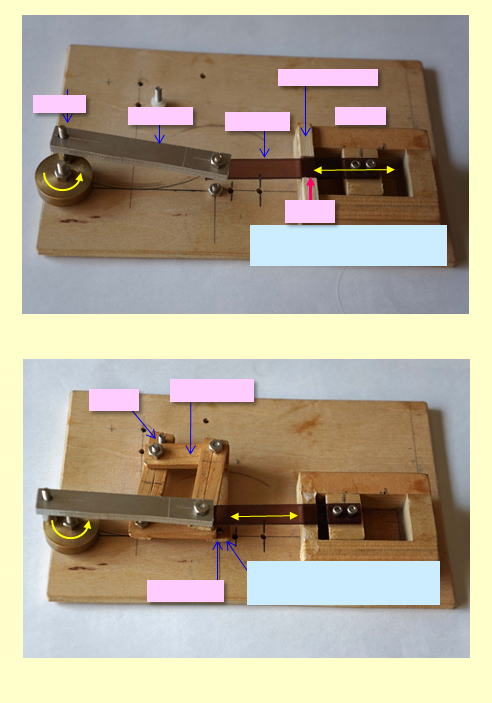
クランク
コンロッド
図1 一般的な蒸気エンジンモデル