変更履歴
2006年10月1日 追加
2006年9月11,16,18,19,23,24,25,26日 追加
2006年9月10日 構成変更
MSP430関連の開発を再開しました(2011年4月4日)
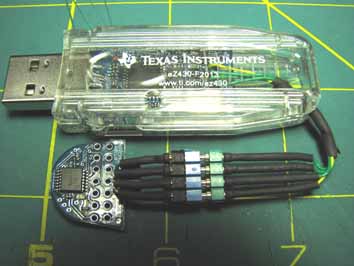
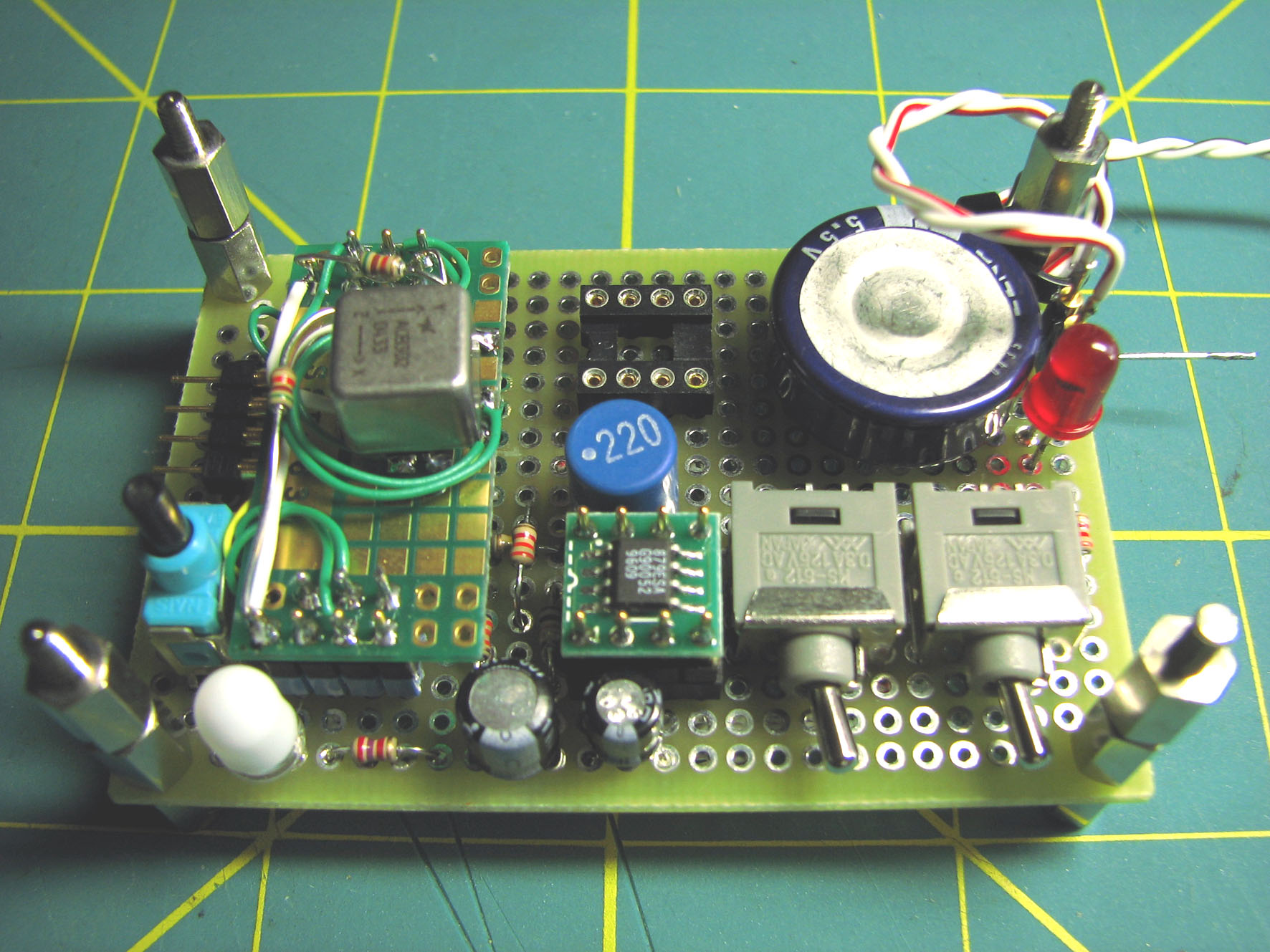
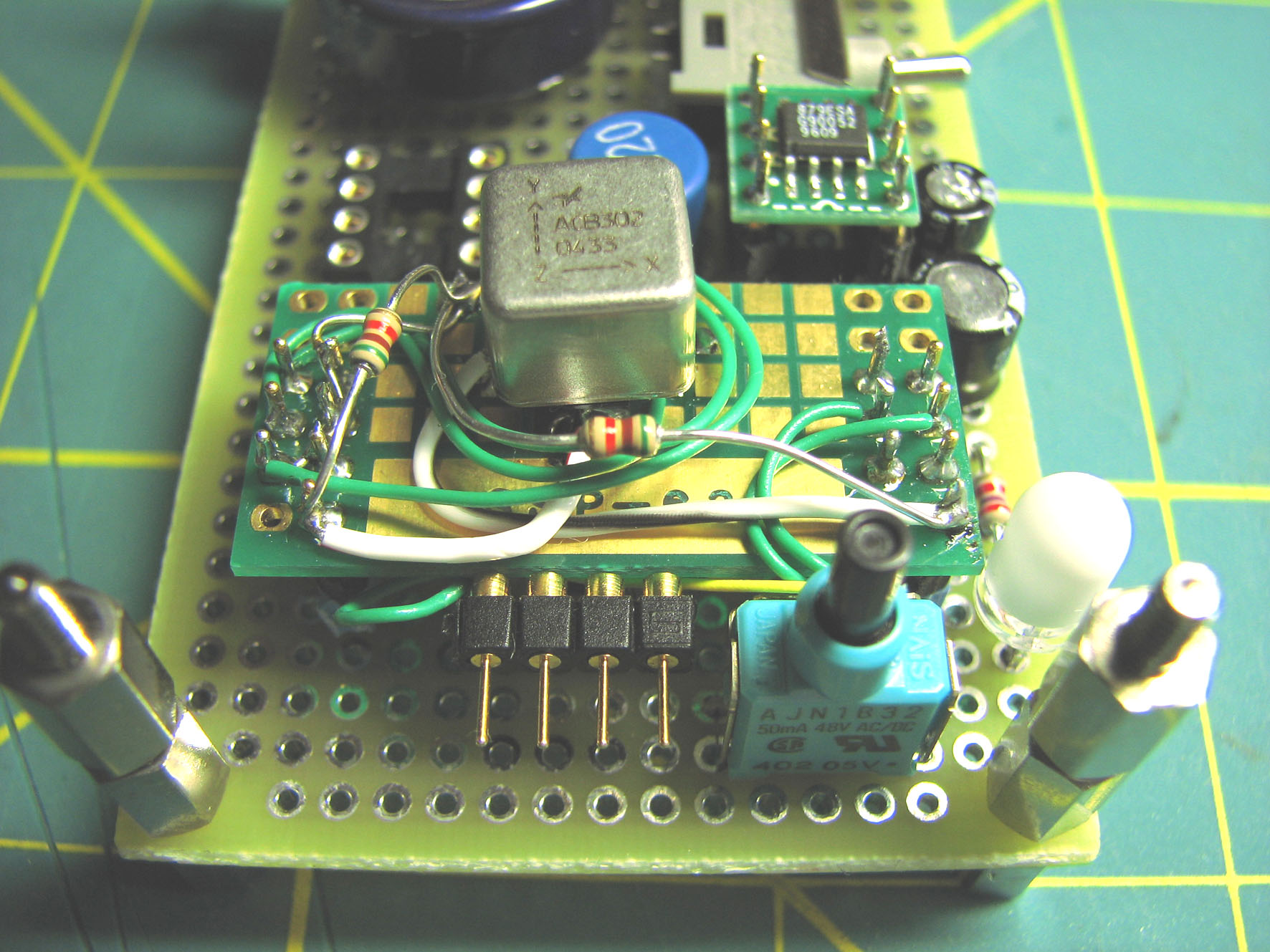
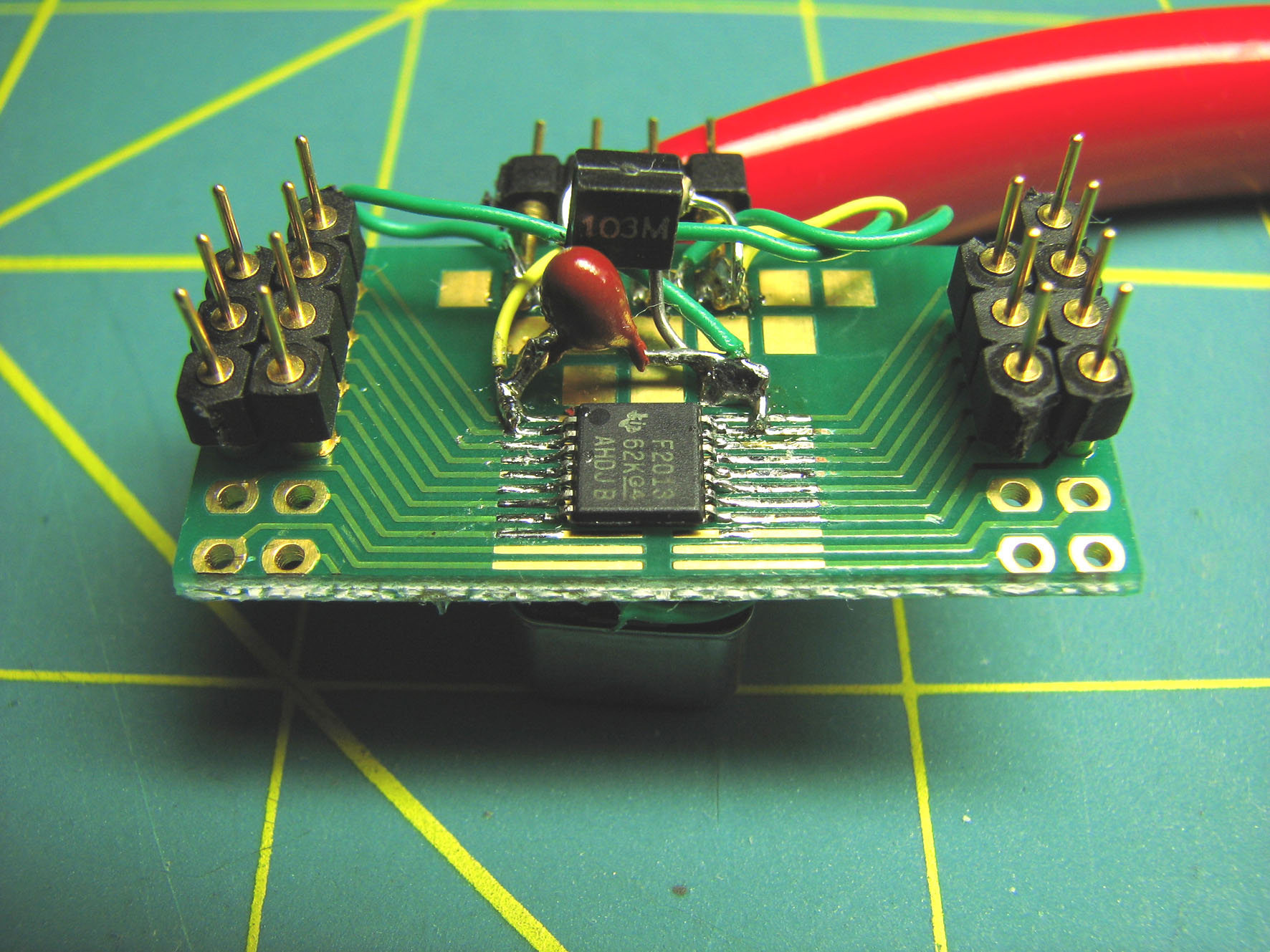
注意:下記の多くの写真に写っているカッティングシートには、黄色の線が引かれていますが、間隔が1インチ幅になっています。注意してください。
記述内容には、思い込みによる記述や十分な検証をしていない部分が存在します。十分に注意してください。
誤り等ありましたら、ご指摘いただけると幸いです。 新井健司 / JH1PJL E-mail :