トピックス
Raspberry Pi Pico
Raspberry Pi と Raspberry Pi Pico
Raspberry PiはHDMIのモニタ出力とUSBやイーサネットのインターフェースを備えたARMコアの超小型シングルボード・コンピュータで、 DebianベースのRaspbianが標準で動くLinux PCとして登場しました。現在ではARMは64ビット・マルチコア化でパワーアップしつつ、 RaspbianはRaspberry Pi OSと名称が変わり、他にサポートするOSの種類も増えているようです。
私は5年程前にシングルコアのRaspberry Pi Model B+ とRaspberry Pi Zeroを購入して、Pythonのsmbusモジュールで主に複数のI2C制御のデバイスを制御に利用していました。
一方Raspberry Pi PicoはイーサネットやHDMIのモニタ出力は持たず、USBも開発ツールとのインターフェース用のみで、MicroPythonで動かせるマイクロコントローラという位置づけです。 MicroPythonの開発ツールはThonny Python IDEで、WindowsだけでなくRaspberry Pi上のRaspberry Pi OSでも動作します。私は今回手持ちのRaspberry Pi Zeroを使用しました。
正弦波発生ロジックのmicroPythonへの移植
もともとハードウェア記述言語VHDLで作成したロジックを強引にMATLAB互換の数値演算プログラムOctaveでシミュレーションしたときのスクリプト Sine Wave(正弦波をつくる)/PWMからPDMへ/Octaveの .m ファイル を更に今回はRaspberry Pi Pico用のMicroPythonに移植し、とりあえずRaspberry Pi Picoを動かしてみました。そのようなわけで本来出力波形の精度を決定するインターバル・タイマも1msのスリープ命令という手抜きのため精度はイマイチなはずです。
from machine import Pin
import utime
#
gpio6 = Pin (6, Pin.OUT)
gpio7 = Pin (7, Pin.OUT)
gpio8 = Pin (8, Pin.OUT)
gpio9 = Pin (9, Pin.OUT)
gpio10 = Pin (10, Pin.OUT)
gpio11 = Pin (11, Pin.OUT)
gpio12 = Pin (12, Pin.OUT)
gpio13 = Pin (13, Pin.OUT)
#initial
st = 0
cnt9bit = [0,0,0,0,0,0,0,0,0,0]
cnt5ref = [0,0,0]
dbl5sin = [0,0,0]
dbl5cos = [0,0,0]
cnt5sin = [0,0,0,0,0]
cnt5cos = [0,0,0,0,0]
div9sin = [0,0,0,0]
div9cos = [0,0,0,0]
enb_sin = [0,0,0,0,0]
enb_cos = [0,0,0,0,0]
cnt9lst = [1,1]
enor_sin = 0
enor_cos = 0
load = 0
sin_p = 0
sin_n = 0
cos_p = 0
cos_n = 0
pwmsin = 0
pwmcos = 0
#
#increment 2-bit binary counter
def cntr2inc1(a):
a[1] = a[1] ^ a[0]
a[0] = 1 ^ a[0]
return a
#increment 3-bit binary counter
def cntr3inc1(a):
a[2] = a[2] ^ (a[1] & a[0])
a[1] = a[1] ^ a[0]
a[0] = 1 ^ a[0]
return a
#increment 4-bit binary counter
def cntr4inc1(a):
a[3] = a[3] ^ (a[2] & a[1] & a[0])
a[2] = a[2] ^ (a[1] & a[0])
a[1] = a[1] ^ a[0]
a[0] = 1 ^ a[0]
return a
#increment 5-bit binary counter
def cntr5inc1(a):
a[4] = a[4] ^ (a[3] & a[2] & a[1] & a[0])
a[3] = a[3] ^ (a[2] & a[1] & a[0])
a[2] = a[2] ^ (a[1] & a[0])
a[1] = a[1] ^ a[0]
a[0] = 1 ^ a[0]
return a
#increment two 5-bit binary counter
def cntr5inc2(a):
a[4] = a[4] ^ (a[3] & a[2] & a[1])
a[3] = a[3] ^ (a[2] & a[1])
a[2] = a[2] ^ a[1]
a[1] = 1 ^ a[1]
return a
#increment 9-bit binary counter
def cntr9inc1(a):
a[8] = a[8] ^ (a[7] & a[6] & a[5] & a[4] & a[3] & a[2] & a[1] & a[0])
a[7] = a[7] ^ (a[6] & a[5] & a[4] & a[3] & a[2] & a[1] & a[0])
a[6] = a[6] ^ (a[5] & a[4] & a[3] & a[2] & a[1] & a[0])
a[5] = a[5] ^ (a[4] & a[3] & a[2] & a[1] & a[0])
a[4] = a[4] ^ (a[3] & a[2] & a[1] & a[0])
a[3] = a[3] ^ (a[2] & a[1] & a[0])
a[2] = a[2] ^ (a[1] & a[0])
a[1] = a[1] ^ a[0]
a[0] = 1 ^ a[0]
return a
#
xnor = lambda x, y: (x ^ y) ^ 1
#
#clock cycle loop
for k in range(512+2048):
cos_p = xnor(cnt5ref[1], dbl5cos[1]) & (cnt5ref[2] ^ dbl5cos[2])
cos_n = xnor(cnt5ref[1], dbl5cos[1]) & xnor(cnt5ref[2], dbl5cos[2])
sin_p = xnor(cnt5ref[1], dbl5sin[1]) & (cnt5ref[2] ^ dbl5sin[2])
sin_n = xnor(cnt5ref[1], dbl5sin[1]) & xnor(cnt5ref[2], dbl5sin[2])
# led.value (sin_p)
# utime.sleep(0.01)
#clock state-0
for st in range(4):
if st == 0:
enor_sin = xnor(cnt5ref[1], cnt5sin[3])
enor_cos = xnor(cnt5ref[1], cnt5cos[3])
cnt9bit = cntr9inc1(cnt9bit)
if load == 1:
div9sin = [0,0,0,0]
div9cos = [0,0,0,0]
else:
if enor_cos == 1:
if div9sin == [0,0,0,1]:
enb_sin = cntr5inc2(enb_sin)
div9sin = [0,0,0,0]
else:
if div9sin[0] == 1:
enb_sin = cntr5inc2(enb_sin)
else:
enb_sin = cntr5inc1(enb_sin)
div9sin = cntr4inc1(div9sin)
if enor_sin == 1:
if div9cos == [0,0,0,1]:
enb_cos = cntr5inc2(enb_cos)
div9cos = [0,0,0,0]
else:
if div9cos[0] == 1:
enb_cos = cntr5inc2(enb_cos)
else:
enb_cos = cntr5inc1(enb_cos)
div9cos = cntr4inc1(div9cos)
#clock state-1
elif st == 1:
dbl5cos = cntr3inc1(dbl5cos)
dbl5sin = cntr3inc1(dbl5sin)
cnt5ref = cntr3inc1(cnt5ref)
load = (cnt9bit[7] ^ cnt9lst[0]) | (cnt9bit[8] ^ cnt9lst[1])
#clock state-2
elif st == 2:
if load == 1:
cnt5sin = [0,0,0,cnt9bit[7] ^ 1, cnt9bit[8] ^ 1]
cnt5cos = [0,0,0,cnt9bit[7], xnor(cnt9bit[7], cnt9bit[8])]
if enb_sin == [1,0,0,1,0]:
enb_sin = [0,0,0,1,1]
elif enb_sin == [0,1,0,1,0]:
enb_sin = [0,0,0,1,1]
elif enb_sin == [1,1,0,1,0]:
enb_sin = [0,0,0,1,1]
elif enb_sin == [0,0,1,1,0]:
enb_sin = [0,0,0,1,1]
elif enb_sin == [1,0,1,1,0]:
enb_sin = [0,0,0,1,1]
elif enb_sin == [0,1,1,1,0]:
enb_sin = [0,0,0,1,1]
elif enb_sin == [1,1,1,1,0]:
enb_sin = [0,0,0,1,1]
else:
enb_sin = [0,0,0,1,0]
if enb_cos == [1,0,0,1,0]:
enb_cos = [0,0,0,1,1]
elif enb_cos == [0,1,0,1,0]:
enb_cos = [0,0,0,1,1]
elif enb_cos == [1,1,0,1,0]:
enb_cos = [0,0,0,1,1]
elif enb_cos == [0,0,1,1,0]:
enb_cos = [0,0,0,1,1]
elif enb_cos == [1,0,1,1,0]:
enb_cos = [0,0,0,1,1]
elif enb_cos == [0,1,1,1,0]:
enb_cos = [0,0,0,1,1]
elif enb_cos == [1,1,1,1,0]:
enb_cos = [0,0,0,1,1]
else:
enb_cos = [0,0,0,1,0]
else:
if enb_sin[4] == 1:
enb_sin[4] = 0
else:
cnt5sin = cntr5inc1(cnt5sin)
if enb_cos[4] == 1:
enb_cos[4] = 0
else:
cnt5cos = cntr5inc1(cnt5cos)
#clock state-3
else:
dbl5cos = [cnt5cos[2],cnt5cos[3],cnt5cos[4]]
dbl5sin = [cnt5sin[2],cnt5sin[3],cnt5sin[4]]
cnt5ref = [cnt9bit[2],cnt9bit[3],cnt9bit[4]]
cnt9lst = [cnt9bit[7],cnt9bit[8]]
if cos_p == 1:
pwmcos = 1
elif cos_n == 1:
pwmcos = 0
else:
pwmcos = pwmcos ^ 1
if sin_p == 1:
pwmsin = 1
elif sin_n ==1:
pwmsin = 0
else:
pwmsin = pwmsin ^ 1
#
gpio6.value (enor_cos)
gpio7.value (enor_sin)
gpio8.value (cos_p)
gpio9.value (cos_n)
gpio10.value (sin_p)
gpio11.value (sin_n)
gpio12.value (pwmcos)
gpio13.value (pwmsin)
utime.sleep(0.001)
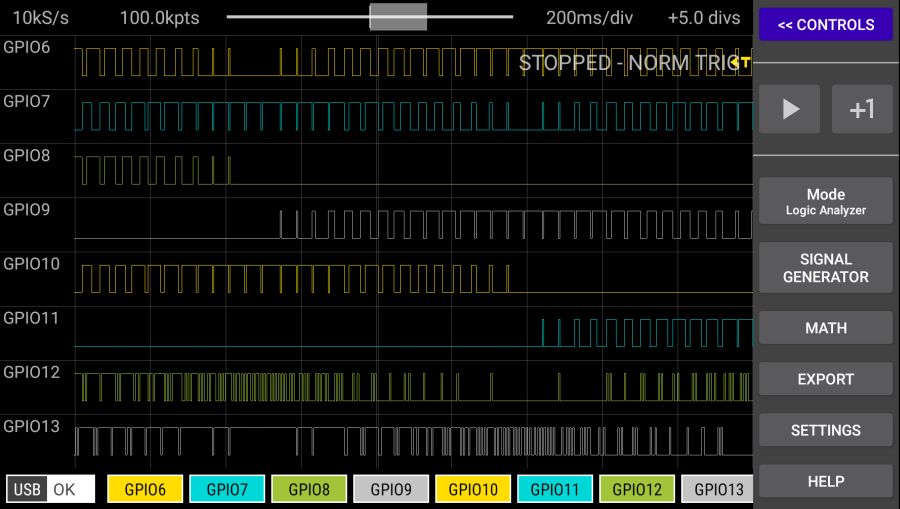
Scoppy
ScoppyはRaspberry Pi Picoのアナログ入力ピンを使用したオシロスコープのAndroidアプリです。Scoppyはまた8chのロジック・アナライザの機能も持っています。更にもう一個Raspberry Pi Picoを購入して Raspberry Pi Pico用のMicroPythonに移植した正弦波発生ロジックの出力波形をScoppyの8chのロジック・アナライザ機能で確認してみました。なお信号名を確認し易いようにMicroPythonによる出力のGPIOピンとScoppyの8chのロジック・アナライザのGPIO入力ピンを一致させています。