リニアマグネットアクチュエータ(以下リニアアクチュエータと略)の最大の特徴は通常のマグネットアクチュエータと比較してどのポジションでも同じ出力になる。通常のマグネットアクチュエータはニュートラル時に電流が流れない。 PWM 制御によりコイルに印加する平均電圧が舵角に応じて増えていく方式なので舵角が少ないほど出力も少ない。ところがリニアアクチュエータの場合はニュートラルから最大舵角まで PWM 制御をしているものの、コイルに印可する平均電圧は常に最大電圧となるためその出力はは比較にならないほど大きい。その分小さなマグネットが使える。このような特徴を生かして小型軽量なリニアアクチュエータを作ることができればピーナッツスケールはもとよりいろいろな飛行機への搭載も可能になる。
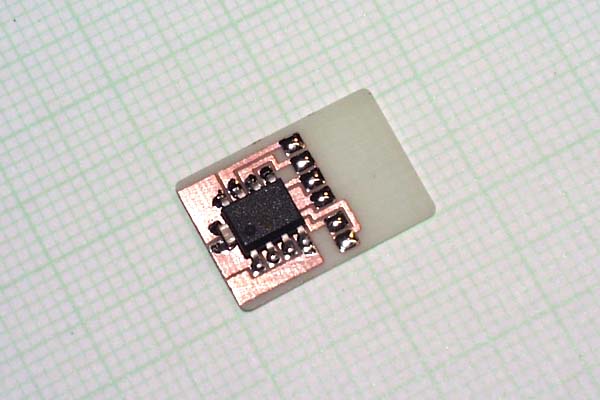
小型で軽量なリニアアクチュエータを作るなら 8 ピンの PIC を使いたい。となると限られたポジション数しか実現できそうもない。ビットチャージーのラジコンカーを改造したインドアエアプレーンではラダーの舵角は右か左のみ。これでもコントロールできるようなので、少ないポジジョン数でも実用になるはずと判断し、 8 ピンの PIC12C509A を使ってリニアアクチュエータを作ってみることにした。
8 ピンの PIC では入力に 1 ポートを使うと、 5 ポートが出力に使える。この 5 ポートを最大限利用して 5 個のコイルをドライブすれば、複雑な PWM 制御をしなくてもポジション数は少ないものの何とかコントロールできそうである。しかし単純にコイルを切り替えるだけではセンターから左右各 2 ポジションにしかならない。もちろんこれでも実用になるとは思うが、できればもう少しステップ数がほしい。
ステップ数を多くするにはどうしたらいいか。隣り合ったコイルに同時に電流を流せば両者のコイルの中間にマグネットが保持されるのでステップ数がもう少し増えるはず。これで左右各 4 ポジションとなる。
早速 PIC12C509A を使ったプログラムを組んでみた。 ついでに信号が途絶えてもニュートラルを保持できるプログラムとした。プログラムは組みあがったものの、効率よくコイルを巻くための装置がまだできていない。いつもこんなことを繰り返している。そこで早速簡単にコイル巻を巻くことのできる巻き取りモータユニットを作ることにした。
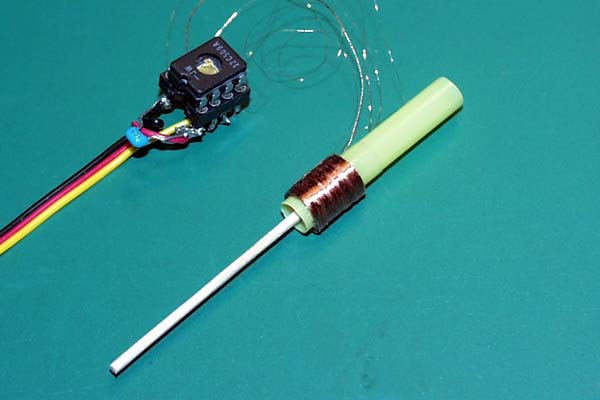
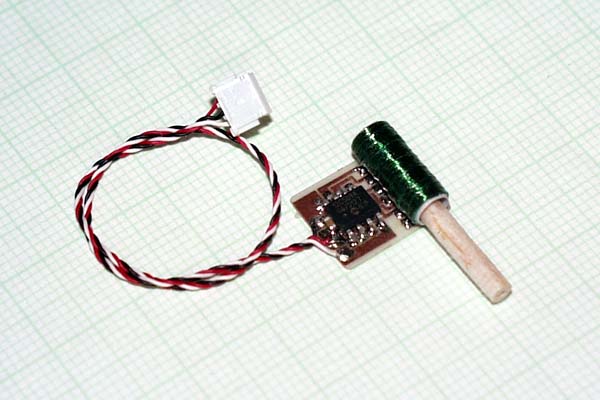
試行錯誤しながらようやく三度目で使い勝手のよい巻き線ユニットができた。とりあえずリニアアクチュエータに使うテスト用のコイルを巻くことになるが、実験用なのでやや大きめのコイルでテストすることにした。内径 6mm ほどのストローに 5 個のコイルを並べて 5x3mm のマグネットでテストする。そこで、幅 3mm のコイルを 0.04mm の線を使って巻いてみた。 200 オームのコイルを巻くのに 700 回巻いた。カウンターをつけたので作業効率が飛躍的に向上し、モータのスピードコントロールの効果もあって、あっという間に 5 個のコイルを巻くことができた。
しばらく試行錯誤の結果、取得したパルス幅に応じて 5 個のコイルをシームレスに切り替えながら PWM 制御をするプログラムを組むことができた。これで一挙に 33 ポジションのコントロールができるようになった。これだけの分解能があれば現行の赤外線受信機のアクチュエータドライブのポジション数より多いので実用上全く問題ないはず。
このリニアアクチュエータはサーボと同じように 3 線式で赤外線受信機にも RF 受信機にも接続して使うことができる。できれば送信機のメーカによるニュートラルパルス幅の違いを吸収できた方がいい。そこで自動的にニュートラルを設定する機能も組み込んでみた。
常にパルス幅に応じた位置にマグネットを保持するので、飛行中の風圧などによる影響を受けにくいのも特徴だ。またニュートラルの保持も強力なので、通常のマグネットアクチュエータのようにヒンジによるニュートラル保持、補助マグネットによるニュートラル保持、マスバランスによるニュートラル保持等で苦労することもない。
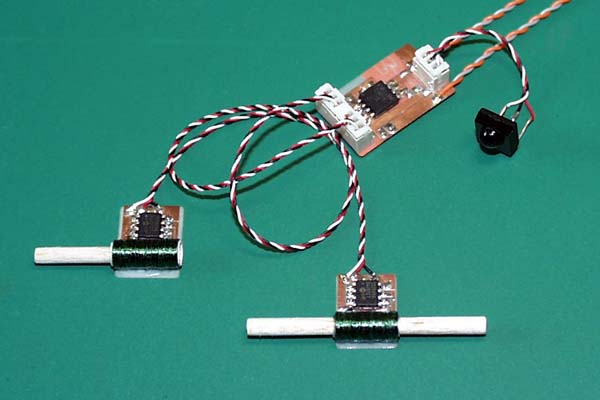
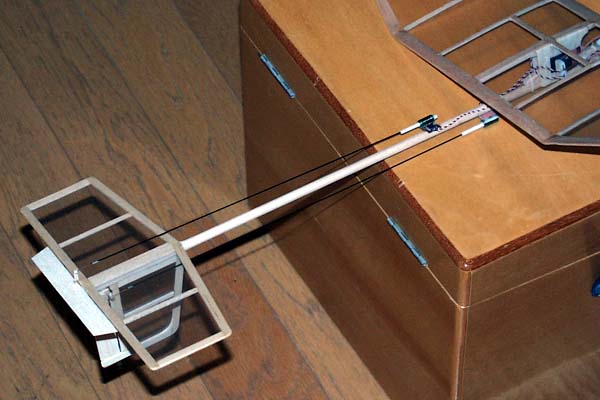
ストローク = コイルの幅 x (コイル個数 - 1) となる。今回は 2mm 幅で巻いたコイルを使ったのでリニアアクチュエータのストロークは 8mm 。 1 ステップ 0.25mm の分解能だ。コイルの巻き幅を変えれば好みのストロークが得られる。
今回プッシュロッドにはバルサ棒を使いマグネットとの接着にボンドサイレックス使ってみた。瞬間接着剤も使ってみたが何かの拍子に剥がれてしまった。バルサ棒の中心に穴を開け、細いカーボンロッドを差し込んで動翼と連結する。