{kind=link}

پœپ@ژہŒ±ƒeپ[ƒ}126
پuCQ_DDSƒXƒ^ƒ“ƒhƒAƒچƒ“‰»پv
پiCQڈo”إژذپFپu‚·‚®ژg‚¦‚éƒfƒWƒ^ƒ‹ژü”gگ”ƒVƒ“ƒZƒTƒCƒUٹî”آپv‚جƒXƒ^ƒ“ƒhƒAƒچƒ“‰»‚ج‹Lژ–پiپu‚ح‚¶‚ك‚ؤ‚جPICپvƒTƒCƒgپj‚ًژQچl‚ة‚µ‚ـ‚µ‚½پBپj
پ،پ@2020.9.4
پ@
پEˆب‘O‚©‚炱‚جٹî”آ‚حپAژ©چىƒIƒVƒچ“™‚جƒ`ƒFƒbƒNژ‚ةٹˆ—p‚µ‚ؤ‚«‚½‚ھپAچإڈ‰‚©‚çPIC‚ةڈ‘چ‚ـ‚ê‚ؤ‚¢‚½
پ@پ@پ@ƒtƒ@پ[ƒ€ƒEƒGƒA‚ھپAUSB‚ةپAPCƒ^پ[ƒ~ƒiƒ‹پFTera Term‚ًگع‘±‚µ‚ؤپA‚»‚±‚©‚ç‚جƒRƒ}ƒ“ƒh‚ة‚و‚ء‚ؤ
پ@پ@پ@DDS‚ًگ§Œن‚·‚é‚à‚ج‚¾‚ء‚½‚ج‚إپAƒZƒbƒeƒBƒ“ƒO‚ھ–ت“|‚إژg‚¢ڈںژè‚ح—ا‚¢‚ئ‚حŒ¾‚¦‚ب‚©‚ء‚½پB
پ@پ@پ@ˆب‘O‚©‚ç‹C‚ة‚حژ~‚ك‚ؤ‚¢‚½‚ج‚¾‚ھپAپu‚ح‚¶‚ك‚ؤ‚جPICپvƒTƒCƒg‚إپA‚±‚ê‚ًƒXƒ^ƒ“ƒhƒAƒچƒ“‰»‚·‚é‹Lژ–‚ھ
پ@پ@پ@چع‚ء‚ؤ‚¢‚é‚ج‚إپA‚±‚ê‚ًژQچl‚ةژ„‚àچى‚ء‚ؤ‚ف‚و‚¤‚ئژv‚¢—§‚ء‚½پB
پ@پ@پEچ،‰ٌ‚حپAƒTƒCƒg‚ة“Y•t‚³‚ê‚ؤ‚¢‚éپAHEXƒtƒ@ƒCƒ‹‚ًپA‚»‚ج‚ـ‚ـژg—p‚³‚¹‚ؤ’¸‚‚±‚ئ‚ة‚·‚éپB
پ@پ@پ@‚½‚¾‰½ژ‚ج‚و‚¤‚ةپAPICkit2‚ًژg‚ء‚ؤڈ‘چ‚ق‚ج‚إ‚ح‚ب‚پAƒuپ[ƒgƒچپ[ƒ_‚ًڈ‘چ‚ٌ‚¾ŒمپAPCƒAƒvƒٹ‚جپuHIDBootloader (Windows).exeپv‚ًژہچs
پ@پ@پ@‚µ‚ؤپAƒvƒچƒWƒFƒNƒg‚جHEXƒtƒ@ƒCƒ‹‚ًپAUSBŒo—R‚إPIC‚ةڈ‘چ‚قƒXƒ^ƒCƒ‹‚ة‚ب‚èپA‚؟‚ه‚ء‚ئ–ت“|‚بٹ´‚¶پB
پ،پ@2020.9.5
پ@
پEڈ‘چ‚ف•û–@‚جڈعچׂبگà–¾‚حƒTƒCƒg‚ة‚ ‚é‚ھپAژ„‚ب‚è‚ةژèڈ‡‚ًگ®—‚µ‚ؤ‚ف‚½پB
پ@پ@پƒ•t‘®DDSٹî”آ‚جپAƒXƒ^ƒ“ƒhƒAƒچƒ“‰»‚جژèڈ‡گ®—پ„
پ@پ@پ@(1) ƒfƒWƒ^ƒ‹ژü”gگ”ƒVƒ“ƒZƒTƒCƒUٹî”آ‚جPIC‚ةپA
پ@پ@پ@پ@پ@ ‚ ‚ç‚©‚¶‚كپAPIC18F14K50—p‚جƒuپ[ƒgƒچپ[ƒ_‚جHEXƒtƒ@ƒCƒ‹پFHID_BL_PIC.hex‚ًپAPICkit2‚ًژg‚ء‚ؤژں‚جژèڈ‡‚إڈ‘چ‚قپB
پ@پ@پ@پ@پ@پ@‡@پ@PICkit2 ƒAƒvƒٹƒPپ[ƒVƒ‡ƒ“ ‚ً‹N“®‚µپABootloader‚جHEXƒRپ[ƒhپu HID_BL_PIC.hexپv‚ًƒCƒ“ƒ|پ[ƒg‚·‚éپB
پ@پ@پ@پ@پ@پ@‡Aپ@PICkit2 ‚إPIC18F14K50‚ةƒRپ[ƒh‚ًڈ‘‚«چ‚قپB
پ@پ@پ@پ@پ@پ@پ¦پ@ˆê“xپAڈ‘‚«چ‚ك‚حپA2“x–ع‚©‚ç‚حپA
پ@پ@پ@پ@پ@پ@پ@پ@ ƒuپ[ƒgƒچپ[ƒ_‚ً“¯‚¶IC‚ةچؤڈ‘‚«چ‚ف‚·‚é•K—v‚ح‚ب‚¢پB
پ@پ@پ@ پ@پ@پ@پ@پ@ƒ†پ[ƒUپ[ƒ\ƒtƒg‚ً‰½“xڈ‘‚«‚ب‚¨‚µ‚ؤ‚àپAƒuپ[ƒgƒچپ[ƒ_پ[ƒvƒچƒOƒ‰ƒ€‚حپA•دچX‚³‚ê‚ب‚¢‚½‚كپA
پ@پ@پ@پ@پ@پ@پ@پ@ گV‹K‚ةPIC IC‚ًچw“ü‚µ‚½‚ئ‚«‚ةˆê“x‚½‚¯پAژہژ{‚·‚éچى‹ئ
پ@پ@پ@پ@پ@پ@پ¦پ@•t‘®DDSٹî”آ‚ة‚حڈo‰×ژ‚ةپAƒtƒ@پ[ƒ€ƒEƒGƒA‚ھڈ‘چ‚ـ‚ê‚ؤ‚¢‚éپB
پ@پ@پ@پ@پ@پ@پ@پ@ پ¨پ@PICkit2‚إپAICPSƒsƒ“Œo—R‚إپARead‚µ‚ؤ‚ف‚½پBپiƒsƒ“‚حƒ‰ƒ“ƒh‚ةچ·چ‚ٌ‚¾‚ھƒnƒ“ƒ_•t‚¯‚ح‚µ‚ؤ‚ب‚¢پBٹî”آ‚ًژخ‚ك‚ة‚µ‚ؤگعگG‚³‚¹‚ؤ‚¢‚éپBپj
پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@‰½‚â‚çپA0x0000پ`پ@0x0FFF‚ةپAƒRپ[ƒh‚ھŒ©‚¦‚éپB
پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@‚»‚µ‚ؤپA0x1000ˆبچ~‚ة‚àپAƒRپ[ƒh‚ھŒ©‚¦‚éپB‚±‚ê‚ھژہچsƒRپ[ƒh‚ئژv‚ي‚ê‚éپB
پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@‚ب‚ج‚إپA0x0000پ`پ@0x0FFFٹش‚جƒRپ[ƒh‚ھپAƒuپ[ƒgƒچپ[ƒ_‚ئژv‚ي‚ê‚é‚ھپA‚±‚ê‚ھPIC18F14K50—p‚جƒuپ[ƒgƒچپ[ƒ_
پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@‚©‚حپH
پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@‚ئ‚ة‚©‚‚±‚ج‚±‚ئ‚ح–³ژ‹‚µ‚ؤپAHID_BL_PIC.hex‚ًڈ‘چ‚ٌ‚إ‚ف‚éپB
پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@ƒ_ƒ“ƒvƒٹƒXƒg‚حژو‚ء‚ؤ‚ ‚é‚ج‚إپAŒم‚إ”نٹr‚µ‚ؤ‚ف‚éپBپ¨پ@ƒtƒٹپ[‚جƒ_ƒ“ƒvƒ\ƒtƒg‚إ”نٹr‚µ‚½‚ھˆظ‚ب‚镨‚ئ”»–¾پF200907
پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پھ
پ@پ@پ@پ@پ@پ@پ¦پ@ŒمپA‚±‚ê‚©‚ç‚¢‚¶‚邱‚ئ‚ة‚و‚ء‚ؤپAچإˆ«پAڈo‰×ژ‚جƒtƒ@پ[ƒ€‚ھڈ‘چ‚ـ‚ꂽڈَ‘ش‚ة–ك‚ç‚ب‚¢‚ئ‚ـ‚¸‚¢‚ج‚إ
پ@پ@پ@پ@پ@پ@پ@ پ@ReadŒم‚ةپAhexƒtƒ@ƒCƒ‹پFCQ_DDS.hex‚ةƒGƒNƒXƒ|پ[ƒg‚µ‚ؤ‚¨‚پB‚ـ‚ ZIPƒtƒ@ƒCƒ‹‚ھژc‚ء‚ؤ‚¢‚é‚ج‚إ‰½‚ئ‚©‚ب‚é‚©‚ئ‚ح
پ@پ@پ@پ@پ@پ@پ@پ@ ژv‚ء‚ؤ‚¢‚é‚ھپEپEپEپ@پ@پ@پ@پ@پ@200907
پ@پ@پ@(2) ‚±‚±‚©‚çپAƒ†پ[ƒUپEƒ\ƒtƒgƒEƒGƒA‚جڈ‘چ‚ف
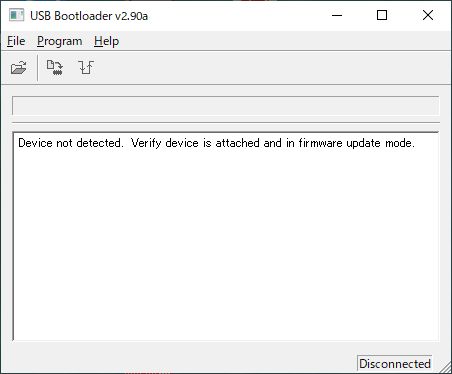
پ@پ@پ@پ@پ@پ@‡@پ@‚ـ‚¸پAPCƒAƒvƒٹ HIDBootloader (Windows).exeپ@‚ً‹N“®پB
پ@پ@پ@پ@پ@پ@پ@پ@ پuDevice not detectedپv‚ئ‚¢‚¤ƒپƒbƒZپ[ƒW‚ھ•\ژ¦‚³‚ê‚éپB
پ@پ@پ@پ@پ@پ@‡Aپ@PIC‚ج4pinپFMCLR/RA3‚ةگع‘±‚³‚ê‚ؤ‚¢‚éSWپi‚±‚جSW‚ح—pˆس•K—vپj‚ً‰ں‚µ‚ب‚ھ‚çپA
پ@پ@پ@پ@پ@پ@پ@پ@ USBƒPپ[ƒuƒ‹‚ًPC‚جUSBƒ\ƒPƒbƒg‚ة‘}“üپBڈ®پA4pin‚حپARA4“ü—ح‚ئ‚µ‚ؤ‹@”\پB
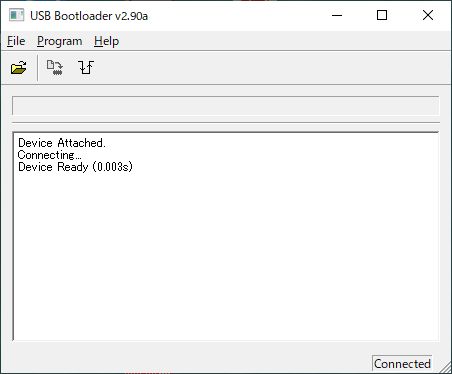
پ@پ@پ@پ@پ@پ@‡Bپ@ƒPپ[ƒuƒ‹‘}“üŒم‚ةSW‚ً—£‚·‚ئپAپuDevice attachedپv‚ئ•\ژ¦‚³‚ê‚éپBپ@
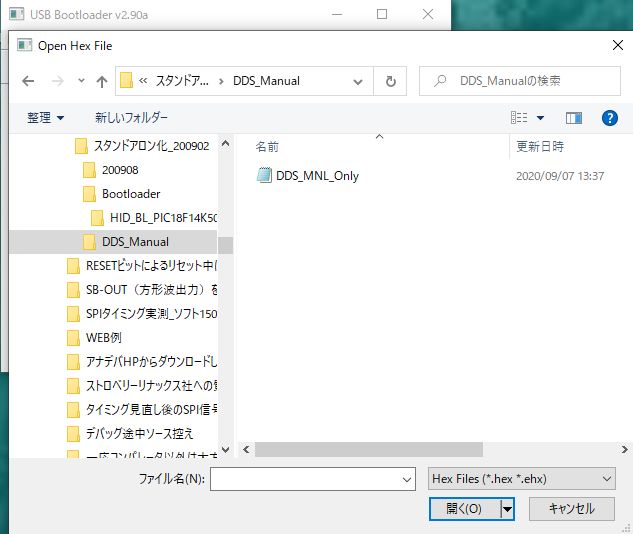
پ@پ@پ@پ@پ@پ@‡Cپ@ƒuپ[ƒgƒAƒvƒٹچ¶ڈم‚جپuImport Firmeware Imageپvƒ{ƒ^ƒ“‚ًƒNƒٹƒbƒNپB
پ@پ@پ@پ@پ@پ@پ@پ@ پuOpen Hex Fileپvƒ_ƒCƒAƒچƒO‚ھٹJ‚‚ج‚إپAPIC‚ةڈ‘‚«چ‚قƒ†پ[ƒUپ[ƒvƒچƒOƒ‰ƒ€‚جHEXƒtƒ@ƒCƒ‹پFDDS_MNL_Only.hex‚ً
پ@پ@پ@پ@پ@پ@پ@پ@ HIDBootLoader‚ة“ا‚فچ‚قپB
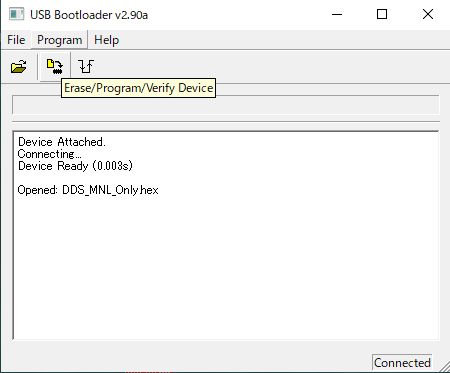
پ@پ@پ@پ@پ@پ@پ@پ@ “ا‚فچ‚ف‚ةگ¬Œ÷‚·‚é‚ئ“ا‚فچ‚ٌ‚¾ƒtƒ@ƒCƒ‹–¼‚ھ•\ژ¦‚³‚êپA
پ@پ@پ@پ@پ@پ@پ@پ@ پuProgram/Verifyپvƒ{ƒ^ƒ“‚ھƒAƒNƒeƒBƒu‚ة‚ب‚éپB
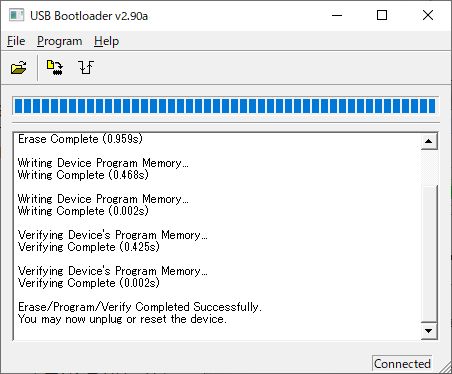
پ@پ@پ@پ@پ@پ@‡Dپ@پuProgram/Verifyپvƒ{ƒ^ƒ“‚ًƒNƒٹƒbƒN‚·‚é‚ئڈ‘‚«چ‚ف‚ھٹJژn‚³‚ê, PIC‚جڈ‘‚«چ‚ف‚ةگ¬Œ÷‚·‚é‚ئ
پ@پ@پ@پ@پ@پ@پ@پ@ پuCompleted Successfullyپv‚ئ•\ژ¦‚³‚ê‚éپB
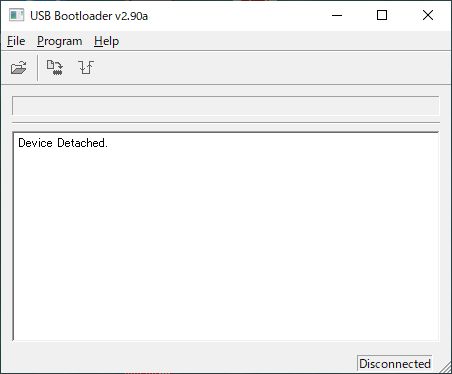
پ@پ@پ@پ@پ@پ@‡Eپ@پuReset Deviceپvƒ{ƒ^ƒ“‚ًƒNƒٹƒbƒN‚·‚é‚©پAUSBƒPپ[ƒuƒ‹‚ًٹO‚·‚ئDevice Detached‚ئ•\ژ¦‚³‚êƒuپ[ƒgƒچپ[ƒ_‚ھگط‚è—£‚³‚ê‚éپB
پ،پ@2020.9.8
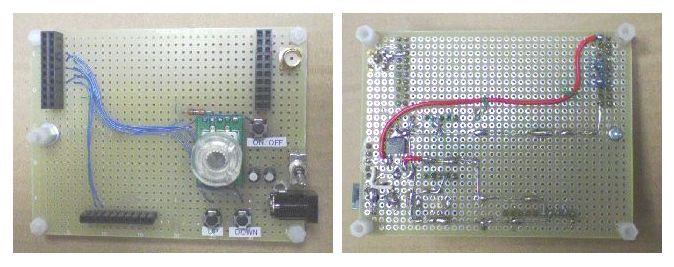
پ@ پEƒnپ[ƒh‚حڈ‚µ‚¾‚ھƒIƒٹƒWƒiƒ‹‚ئ•د‚¦‚ؤ‚ ‚éپB
پ@پ@پƒƒIƒٹƒWƒiƒ‹‚ئˆظ‚ب‚éژه‚ب‰سڈٹپ„
پ@پ@پ@‡@پ@LCD‚ج“dŒ¹‚ح‘f’¼‚ةپAژèژ‚؟‚ة‚ ‚ء‚½پA3.3Vڈo—ح‚ج3’[ژqƒŒƒMƒ…ƒŒپ[ƒ^‚ًژg‚ء‚½پBپ¨پ@ƒIƒٹƒWƒiƒ‹‚حRB4‚ً"Hi"‚ة‚µ‚½‚ج‚ًˆَ‰ء
پ@پ@پ@‡Aپ@ƒIƒٹƒWƒiƒ‹‚ة‚ح“dŒ¹SW‚ھ–³‚¢‚ج‚إ’ا‰ء‚µ‚½پB
پ@پ@پ@‡Bپ@ƒچپ[ƒ^ƒٹƒGƒ“ƒRپ[ƒ_‚إ‚ ‚é‚ھپAژ„‚جژè”zƒ~ƒX‚إپAƒvƒbƒVƒ…SW“à‘ ‚إ‚ب‚¢پALED‚ج‚ف“à‘ ƒ^ƒCƒv‚ًچw“ü‚µ‚ؤ‚µ‚ـ‚ء‚½ˆ×پA
پ@پ@پ@پ@پ@ ON/OFF‚جƒvƒbƒVƒ…SW‚ح•ت•t‚¯‚µ‚½پB
پ@پ@پ@‡Cپ@ƒIƒٹƒWƒiƒ‹‚ج‰ٌکHگ}‚ئپAƒ\پ[ƒXپEƒtƒ@ƒCƒ‹‚ًŒ©‚ؤ‚¢‚ؤ‹C‚ھ•t‚¢‚½‚ج‚¾‚ھپA
پ@پ@پ@پ@پ@ UP/DWN SW‚جƒ|پ[ƒgگع‘±‚ھپAƒ\پ[ƒX‚ج’è‹`‚ئ‹t‚ة‚ب‚ء‚ؤ‚¢‚½‚ج‚إ’¼‚µ‚½پBپi•ت’i‚½‚¢‚µ‚½–â‘è‚إ‚ح–³‚¢‚ھپEپEپEپj
پ@پ@پ@پ@پ@ ƒ\پ[ƒX‚ج’è‹`‚حپAUP_SWپ¨ RB5پ^DWN_SWپ¨ RB7‚ة‘خ‚µپA‰ٌکHگ}‚حپAUP_SWپ¨
RB7پ^DWN_SWپ¨ RB5‚ة‚ب‚ء‚ؤ‚¢‚½پB
پ@پ@پ@پ¦پ@ƒ\پ[ƒX‚ةپA“à•”ƒvƒ‹ƒAƒbƒv‚جگف’è‚ھ–³‚¢‚ج‚ًŒ©‚ؤچإڈ‰پA‰ٌکHگ}ڈم‚ةٹO•”ƒvƒ‹ƒAƒbƒv‚ً’ا‰ء‚µ‚½‚ھپA‚و‚‚و‚ƒ{پ[ƒh‚ج
پ@پ@پ@پ@پ@ ‰ٌکHگ}‚ًŒ©‚é‚ئپAI2C‚ًٹـ‚ك‘S‚ؤ‚ج“ü—ح‚ة10K‚ج’ïچRپiSMTƒ^ƒCƒv‚ج’ïچRƒAƒŒپ[پj‚ھگع‘±‚³‚ê‚ؤ‚¢‚½‚ج‚إƒ†ƒjƒoپ[ƒTƒ‹پiUNVپjٹî”آگ»چى‘O‚ة
پ@پ@پ@پ@پ@ UNVٹî”آ‚ج‰ٌکHگ}‚ً’¼‚µ‚½پB
پ@پ@پ@پ¦پ@I2C‰tڈ»‚حپAˆب‘OژہŒ±ƒeپ[ƒ}‚إچى‚ء‚½ƒ‚ƒWƒ…پ[ƒ‹‚ًژg‚¢‰ٌ‚µ‚½پBپi‚±‚ê‚ة‚حƒvƒ‹ƒAƒbƒv‚ھ•t‚¢‚ؤ‚¢‚é‚ھپAƒnƒ“ƒ_‚ًٹO‚µ‚½پBپj
پ@پ@پE9Œژ5“ْ‚ةگ®—‚µ‚½ژèڈ‡‚إپAƒuپ[ƒgƒچپ[ƒ_پFHID_BL_PIC.hex‚ئپAƒ†پ[ƒUپEƒ\ƒtƒgƒEƒGƒAپFDDS_MNL_Only.hex‚ًپAPIC‚ةڈ‘چ‚ٌ‚¾پB
پ@پ@پ@ƒuپ[ƒgƒچپ[ƒ_‚جHEXƒtƒ@ƒCƒ‹‚حپA‰½ژ‚à‚ج—l‚ةپAICPSƒsƒ“‚و‚èپAPICkit2‚إڈ‘چ‚ٌ‚¾پB
پ@پ@پ@ˆب‰؛‚ةپAƒ†پ[ƒUƒ†پ[ƒUپEƒ\ƒtƒgƒEƒGƒA‚جHEXƒtƒ@ƒCƒ‹‚ًUSBŒo—R‚إپAPCPCƒAƒvƒٹ HIDBootloader(Windows).exe‚ة‚و‚ء‚ؤ
پ@پ@پ@ڈ‘چ‚ٌ‚¾ژ‚جپAƒXƒNƒٹپ[ƒ“پEƒVƒ‡ƒbƒg‚ًƒAƒbƒv‚µ‚½پB
پ@پ@پ@پ@پ@پ@‡@پ@‚ـ‚¸پAPCƒAƒvƒٹ HIDBootloader (Windows).exeپ@‚ً‹N“®پB
پ@پ@پ@پ@پ@پ@پ@پ@ پuDevice not detectedپv‚ئ‚¢‚¤ƒپƒbƒZپ[ƒW‚ھ•\ژ¦‚³‚ê‚éپB
پ@پ@پ@پ@پ@پ@‡Aپ@PIC‚ج4pinپFMCLR/RA3پiICPS-1pinپj‚ةگع‘±‚µ‚½SWپi‚±‚جSW‚حژèژ‚؟‚جƒXƒ‰ƒCƒhSW‚ة‚µ‚½پBپj‚ًON‘¤پFLo‚ةƒZƒbƒg‚µ
پ@پ@پ@پ@پ@پ@پ@پ@ USBƒPپ[ƒuƒ‹‚ًPC‚جUSBƒ\ƒPƒbƒg‚ة‘}“üپBڈ®پA4pin‚حپARA4“ü—ح‚ئ‚µ‚ؤ‹@”\پB

پ@پ@پ@پ@پ@پ@‡Bپ@ƒPپ[ƒuƒ‹‘}“üŒم‚ةSW‚ًOFF‘¤پFHi‚ة‚·‚é‚ئپAپuDevice attachedپv‚ئ•\ژ¦‚³‚ê‚éپB

پ@پ@پ@پ@پ@پ@‡Cپ@ƒuپ[ƒgƒAƒvƒٹچ¶ڈم‚جپuImport Firmeware Imageپvƒ{ƒ^ƒ“
![]() ‚ًƒNƒٹƒbƒNپB
‚ًƒNƒٹƒbƒNپB
پ@پ@پ@پ@پ@پ@پ@پ@ پuOpen Hex Fileپvƒ_ƒCƒAƒچƒO‚ھٹJ‚‚ج‚إپAPIC‚ةڈ‘‚«چ‚قƒ†پ[ƒUپ[ƒvƒچƒOƒ‰ƒ€‚جHEXƒtƒ@ƒCƒ‹پFDDS_MNL_Only.hex‚ً
پ@پ@پ@پ@پ@پ@پ@پ@ HIDBootLoader‚ة“ا‚فچ‚قپB
پ@پ@پ@پ@پ@پ@پ@پ@ “ا‚فچ‚ف‚ةگ¬Œ÷‚·‚é‚ئ“ا‚فچ‚ٌ‚¾ƒtƒ@ƒCƒ‹–¼‚ھ•\ژ¦‚³‚êپA
پ@پ@پ@پ@پ@پ@پ@پ@ پuProgram/Verifyپvƒ{ƒ^ƒ“‚ھƒAƒNƒeƒBƒu‚ة‚ب‚éپB
پ@پ@پ@پ@پ@پ@‡Dپ@پuProgram/Verifyپvƒ{ƒ^ƒ“‚ًƒNƒٹƒbƒN‚·‚é‚ئڈ‘‚«چ‚ف‚ھٹJژn‚³‚ê, PIC‚جڈ‘چ‚ف‚ةگ¬Œ÷‚·‚é‚ئ
پ@پ@پ@پ@پ@پ@پ@پ@ پuCompleted Successfullyپv‚ئ•\ژ¦‚³‚ê‚éپB
پ@پ@پ@پ@پ@پ@‡Eپ@پuReset Deviceپvƒ{ƒ^ƒ“
![]() ‚ًƒNƒٹƒbƒN‚·‚é‚©پAUSBƒPپ[ƒuƒ‹‚ًٹO‚·‚ئDevice Detached‚ئ•\ژ¦‚³‚êƒuپ[ƒgƒچپ[ƒ_‚ھگط‚è—£‚³‚ê‚éپB
‚ًƒNƒٹƒbƒN‚·‚é‚©پAUSBƒPپ[ƒuƒ‹‚ًٹO‚·‚ئDevice Detached‚ئ•\ژ¦‚³‚êƒuپ[ƒgƒچپ[ƒ_‚ھگط‚è—£‚³‚ê‚éپB
پ،پ@2020.9.10
پ@ پEUNVٹî”آ‚جژہ‘•‚ھٹ®—¹‚µ‚½پB
پ،پ@2020.9.11
پ@ پE“®چىٹm”F‚ًچs‚ء‚½پB
پ@پ@پ@‰ز“ژ‚ج“dŒ¹“dˆ³‚حپA5.22VپE3.32V‚¾‚ء‚½پB
پ@پ@پ@–â‘è–³‚“®‚¢‚ؤ‚¢‚é‚و‚¤‚إ‚ ‚éپB
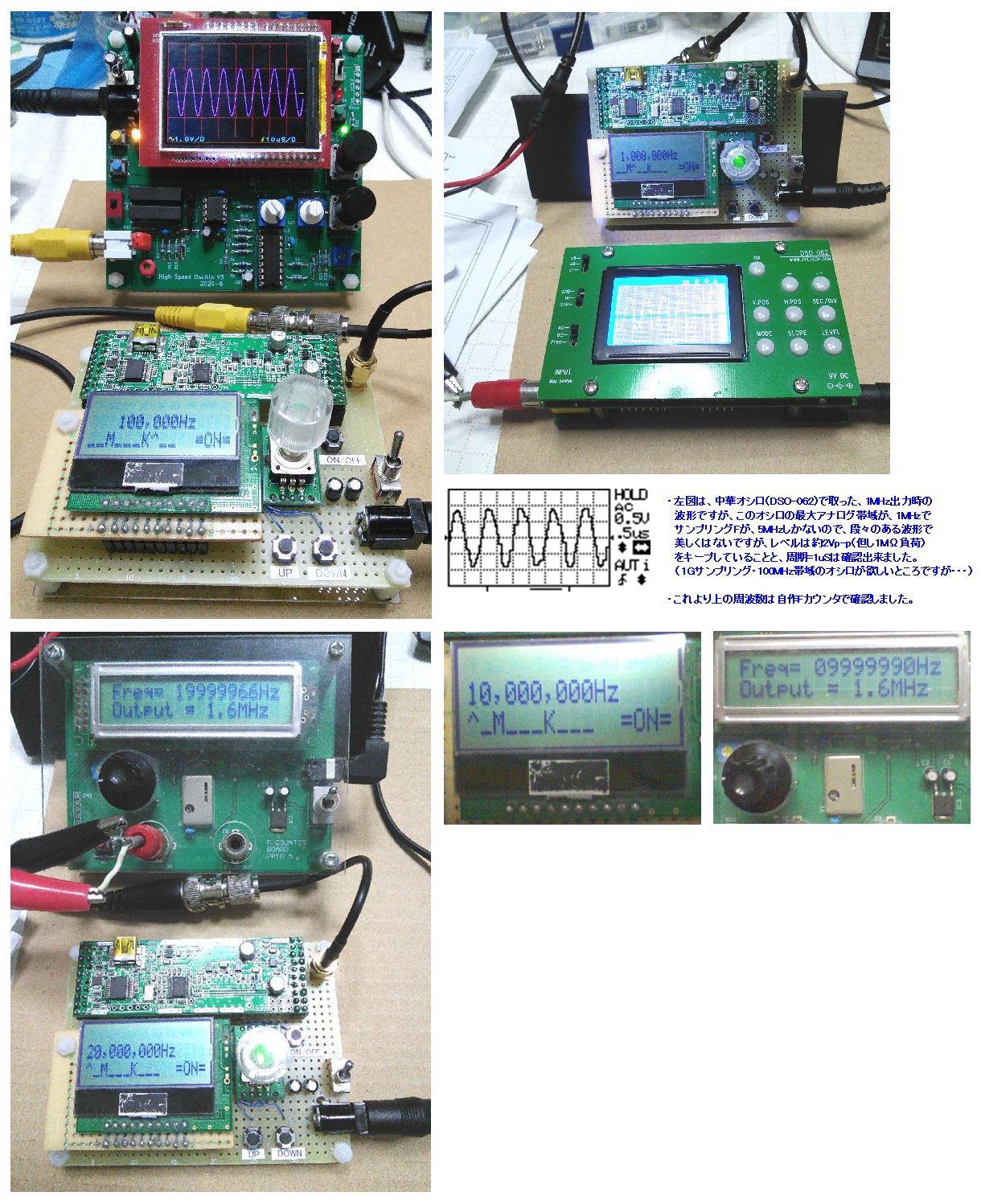
پ@پ@پ@پ@‡@پ@ژü”gگ”گف’è‚حپAچإڈ¬0Hz‚ـ‚إڈo—ˆ‚é‚ھپA’لˆو‚حپA50Hz‚©‚çƒtƒ‰ƒbƒg‚جژd—l‚ة‚ب‚ء‚ؤ‚¢‚éپB
پ@پ@پ@پ@‡Aپ@چإ‘هگف’è‚حپA20MHz‚إپA‚±‚±‚ـ‚إƒtƒ‰ƒbƒg‚جژd—lپB
پ@پ@پ@پ@‡Bپ@P_ONژ‚حپA800HzپEڈo—حپFOFF‚ة‚ب‚ء‚ؤ‚¢‚é‚ج‚إپAON/OFF
SW‚ً‰ں‚µ‚ؤپAON‚ة‚·‚éپB
پ@پ@پ@پ@پ@پ@ ˆب‰؛‚ةپA‚»‚جژ‚جڈo—ح‚ًژ©چىFƒJƒEƒ“ƒ^‚إٹm”F‚µ‚ؤ‚¢‚éژتگ^‚ًژ¦‚µ‚½پB
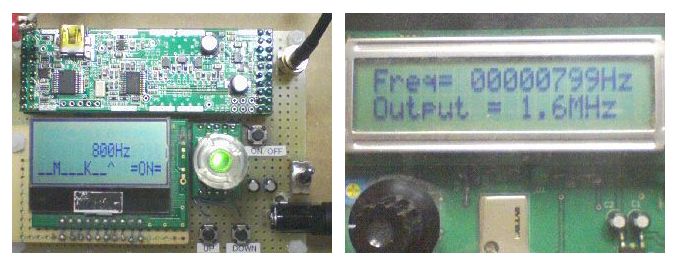
پ@پ@پ@پ@‡Cپ@‚»‚ج‘¼پA‚¢‚‚آ‚©ƒTƒ“ƒvƒ‹‚ًژB‚ء‚½‚ج‚إپAˆب‰؛‚ةژ¦‚µ‚ـ‚µ‚½پB
پ@پ@پEپƒٹ´‘zپEڈٹٹ´پ„
پ@پ@پ@پ@‡@پ@ژü”gگ”‰آ•دچإڈ¬ƒXƒeƒbƒv‚حپA1Hz‚إ‰آ•دڈo—ˆ‚ـ‚µ‚½پB
پ@پ@پ@پ@پ@پ@
ƒ`ƒƒƒ^ƒٹƒ“ƒOڈˆ—‚حŒّ‚¢‚ؤ‚¢‚ـ‚·‚ھپA‘¬‚ك‚ةƒچپ[ƒ^ƒٹƒGƒ“ƒRپ[ƒ_‚ً‰ٌ‚·‚ئپA4Hz‚ظ‚ا”ٍ‚ش‚±‚ئ‚ھ‚ ‚è‚ـ‚·پB
پ@پ@پ@پ@پ@پ@ ‚ن‚ء‚‚è‚ئ‹t‰ٌ‚µ‚إ–ك‚¹‚خ–â‘è–³‚پA-1Hzڈo—ˆ‚ـ‚µ‚½پB
پ@پ@پ@پ@‡Aپ@‰tڈ»‰و–ت‚ج•\ژ¦چ\گ¬‚ھپA•ھ‚©‚èˆص‚‚ؤ—ا‚¢‚ئژv‚¢‚ـ‚·پB
پ@پ@پ@پ@پ@پ@ “ء‚ةپA’Pˆت‚ج"M"‚ئپA"K"‚ًپA‘خ‰‚·‚錅‚ج‰؛‚ة“ü‚ê‚ؤ‚ ‚é‚ج‚ح“ا‚فˆص‚‚ؤ—ا‚¢‚ئژv‚¢‚ـ‚·پB
پ@پ@پ@پ@‡Bپ@ƒJپ[ƒ\ƒ‹‚جˆع“®ڈˆ—‚àƒXƒ€پ[ƒX‚إ–â‘è‚ب‚¢‚إ‚·پB
پƒ‰ٌکHگ}پ„
پ@پE‚±‚؟‚ç‚©‚ç‚ا‚¤‚¼پ¨پ@پuCQ_DDSƒXƒ^ƒ“ƒhƒAƒچƒ“‰»پv
پ@
پ©پ@ژہŒ±ƒeپ[ƒ}1‚ة–ك‚éپ@پ@پ@TOP PAGE‚ة–ك‚éپ@پ@پ@ژہŒ±ƒeپ[ƒ}127‚ضپ@پ¨
{kind=link}