
�V�[�P���X�A�����ăC���o�[�^�̖�������
| 4�K�@�K�C�h�V�[�u�f�b�L |

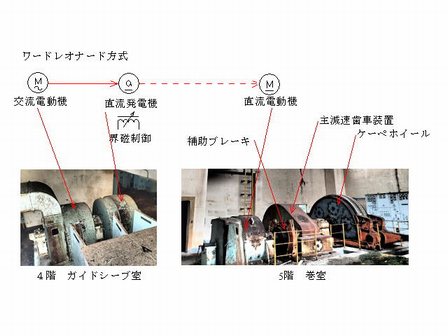










| 5�K�@����@�� |

 �@�@
�@�@
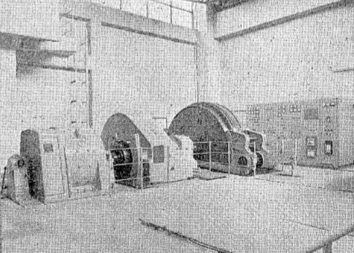 ���a40�N�@������
���a40�N�@������



 �@�@�@
�@�@�@



























 �@�@
�@�@




 �@�@
�@�@

 �@�@�@
�@�@�@



![���]](hP7085741.jpg)