GWR-4P 受信機の改造
[Previous]
[Next]
[Index]
GWS の安価で軽量な受信機を改造してマグネットアクチュエータをドライブする
今までは主に赤外線を使ってマグネットアクチュエータをドライブする受信機を作ってきたが、もっと手軽にアクチュエータを搭載した飛行機を飛ばしたいという要望も多い。 RF システムによる軽量な受信機はまだまだ高価だ。そこで最も安価で軽量な GWS の 4 チャンネル受信機を使って 2 組のマグネットアクチュエータとスピードコントローラを組み込んでみた。
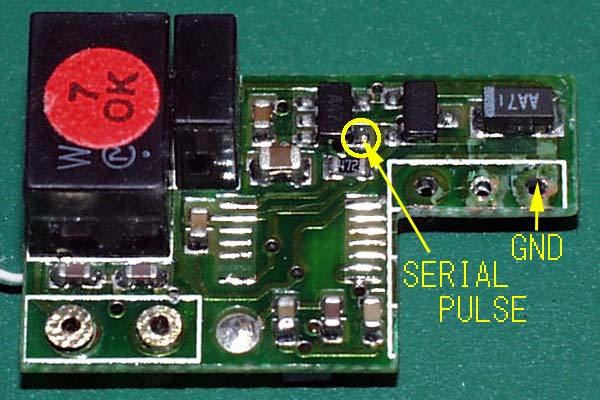
基本的には赤外線受信機と変わらないが、赤外線受光素子を使用した場合は立ち下がりパルス(負論理)を PIC の入力としたが、 GWR-4P から取り出すことのできるシリアルパルスは立ち上がりパルス(正論理)なのでそのまま今までの受信機に接続しても動作しない。そこで新たに GWS 受信機につなげることのできるものを作った。
GWS 受信機 GWR-4P(40MHz) に搭載されているデコーダは必要なくなる。軽量化するためにコネクタとともに基板をカットし、デコーダチップも除去した。
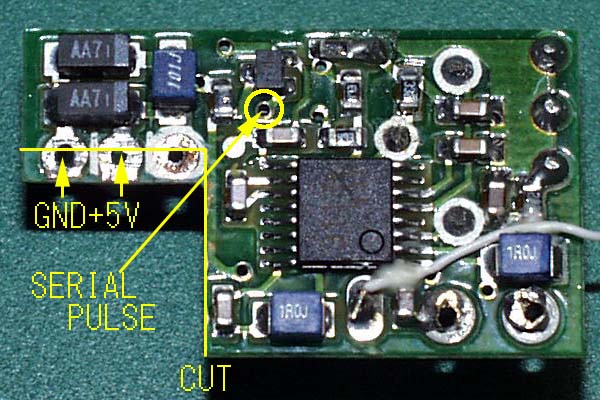
上記の状態で 2.9g 。クリスタルを付けても 3.2g と結構軽い。アンテナは極細のものに変更し、長さを半分の 50cm にしてある。デコーダチップは少しでも軽く、少しでも消費電流を少なくと思って外したが、外すのが面倒ならそのままにしてもかまわない。後日黄色のカットライン沿って切り欠き部分を少し広げた。

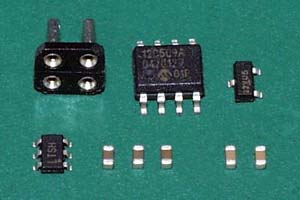
受信機の電源には DC-DC コンバータから 5V を供給する。電流供給能力は 100mA あるので GWS 受信機に電源を供給しても十分に余裕がある。今回の改造に必要な部品は下記の通り。
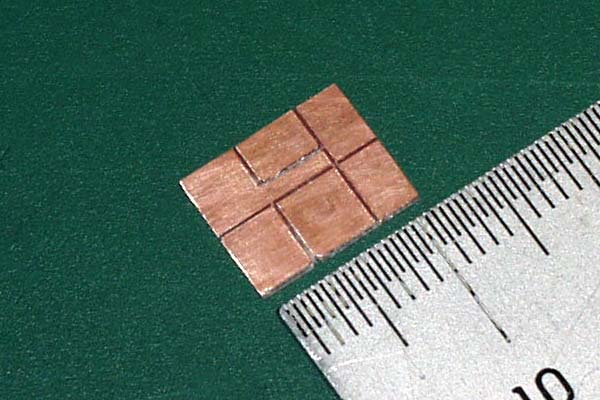
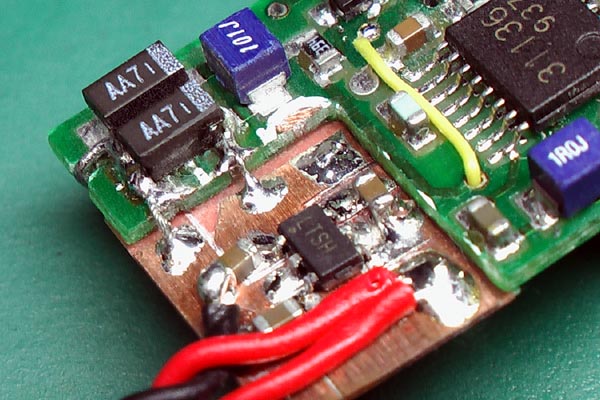
受信機の切り取った部分にデコーダ基板を貼り付けるため、 0.2mm ガラスエポキシ両面基板(両面の銅箔を含めると0.3mm強)を 11mmx9mm の大きさにカットし、表面に PIC と FET 、裏面に DC/DC converter を取り付けるようにカッタナイフを使ってパターンをカットした。基板が薄いので力を入れすぎると使い物にならなくなってしまう。
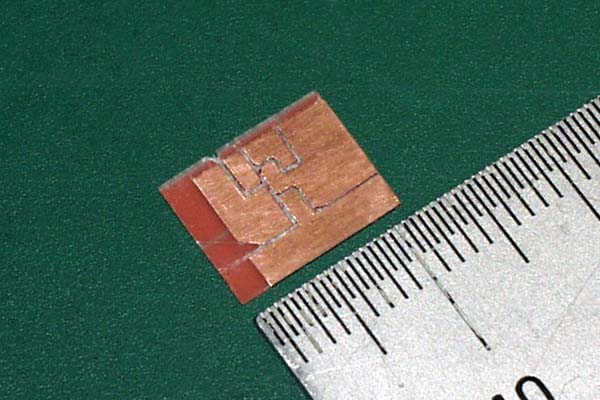
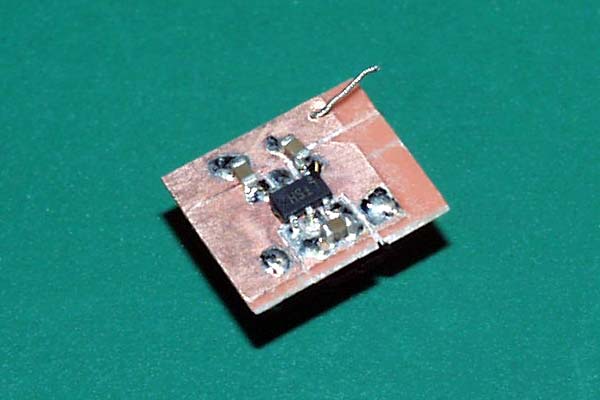
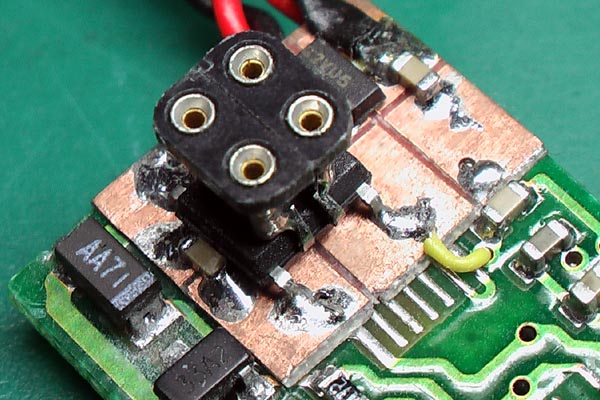
マグネットアクチュエータの接続にはコネクタを使い、 PIC の 2,3,6,7 番ピンを上に曲げてコネクタにはんだ付けする。こうすることで基板のパターンが簡素化できる。部品のはんだ付けは裏側の DC-DC コンバータを組み立てて、きちんと 5V が出力されているかを確認してから表面の部品をはんだ付けする。基板の 3 カ所に 0.5mm のドリルで穴を開け、細線でスルーホール処理をする。画像の細線はあとで受信機の GND に接続する。銅箔を L 字形に剥がしてある部分が受信機の基板と重なる。
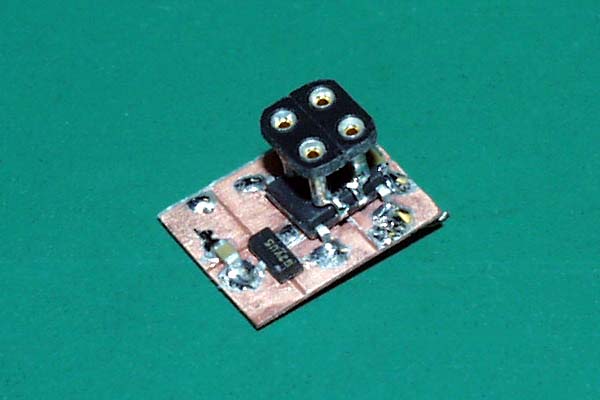
組み立てた基板の一部を受信機側の基板に重ねて瞬間接着剤で固定する。固定後 DC-DC converter の 5V 出力を受信機の電源端子にはんだ付けし、シリアルパルス出力を PIC の 4 番ピンにジャンパ配線する。

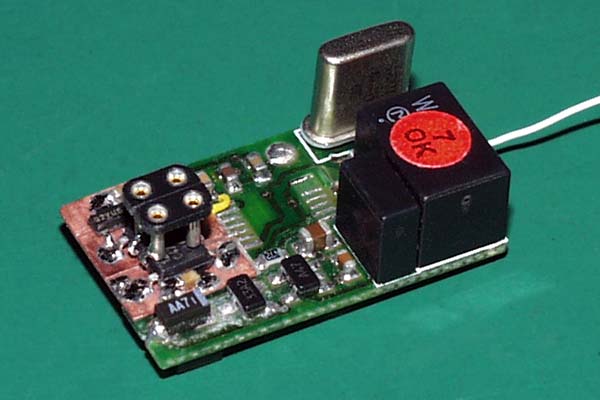

あとは電池をつなぐための電源ケーブルとモータへの出力ケーブルをはんだ付けして完成。上の状態で 3.7g 。マグネットアクチュエータには 200Ω以上のコイルを使う。
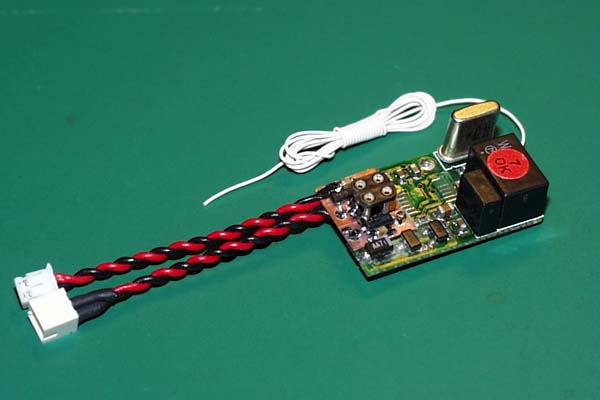
2P の JST コネクタを付けた電源ケーブルとモータケーブルをはんだ付けして改造受信機が完成した。重量は 4.0g 。リチウムイオン電池をつないで KP00 + U80 で回してみた。赤外線受信機の消費電流にくらべてアイドル電流は 16mA とかなり多いが 5V でのドライブはすこぶる安定している。 140mAh Li-Po(4g) + GWS mod(4g) + KP00 + U80(5.5g) = 13.5g 。 200Ωアクチュエータ 2 組を使って 30g ぐらいまでの飛行機が飛ばせそう。
[Previous]
[Next]
[Index]
2003/10/05