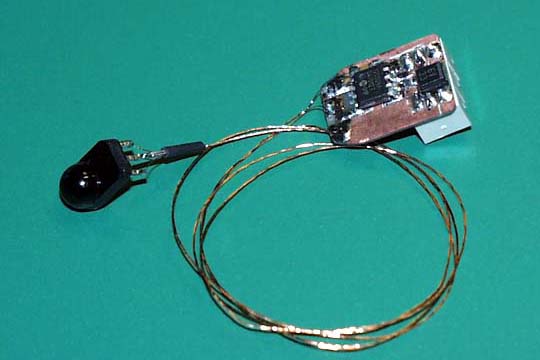
機能部品はたったの 3 個だが、念のため電源平滑用に 33μF のチップタンタルコンデンサを追加した。 PIC そのものは 5V 以下でも動作するが、赤外線受光素子の定格が 5V なので、リチウム電池 1 セルでは動作に支障が出てくる。従ってリチウムイオン 2 セル以上の電圧で、スピードコントローラの BEC から電源を供給する形で使うことになる。
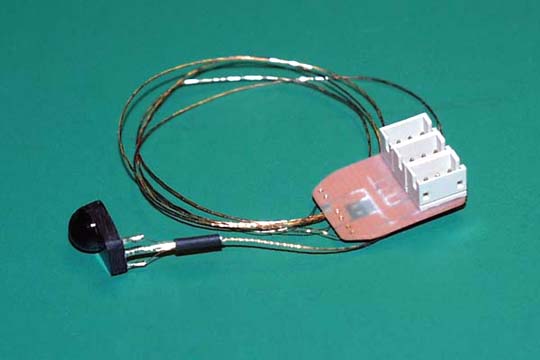
いつものように空中配線で組み立ててもいいが、今回は 0.5mm の両面ガラスエポキシ基板を使ってみた。部品の実装は片面で済んでしまうので、使わない片面の銅箔は剥がした。しかも簡単なパターンなので、今回もカッタナイフを使ってパターンをカットした。基板サイズは 11mmx16mm 。
赤外線受光素子と本体の間は 0.1mm の銅線を 3 本撚りにして 400mm の長さにした。重量は画像の状態で 1.1g (receiver 0.9g + IR sencer 0.2g) 。飛行中受光素子がなるべく送信機から陰にならない位置へ取り付けることが肝心で、必要なら複数の受光素子を使うことができる。
今回の受信機は入力のシリアルパルスをリアルタイムでチャンネルごとに振り分けているだけなので、受信障害が発生したときもそのままサーボと、スピードコントローラに反映されることになる。スピードコントローラにはフェールセーフを備えたものを使うほうが安全だ。受信障害を防ぐためにはできるだけ受光素子が送信機から陰にならない位置にセットする必要がある。良い点はどこのメーカの送信機でも使える。また、サーボの替わりにマグネットアクチュエータドライバを繋ぐことも可能だ。
| 3 CHANNEL IR RECEIVER IRXS300 | 3ch-dec1.hex for 12C509A |