重力損失について(その2)
|
改定:(2022年6月16日) (2015年2月10日) 人工衛星を打ち上げる大型のロケットは多くは1段ロケットの周囲に固体ロケットを取り付けるのは、のろのろ上がると重力損失が大きくで非効率だからでした。 それは下りのエスカレータを逆に上がる時も同じで、一気に駆け上がらないと何時までも上に到達しないことから類推できるということでした。 普通の階段を上る時は階段のステップが常時体重を支えてくれます。従って、重力損失はありませんからゆっくり上っても余計に疲れることにはなりません。 それでは小・中学校の運動場にある竹登りやロープ登りではどうでしょうか。自分の体重を常に竹またはロープが支えてくれていますから重力損失はありません。その代り、自分の体重を持ち上げる力に加えて、竹やロープにしがみつく力が余計に要ります。 東京スカイツリーのエレベータ・システムにはバランス・ウエイト(釣り合い錘)があります。籠が乗客で満員のときも空のときもありますから、何時も完全に釣り合わせることはできません。 もし完全に釣り合わせることが出来たとしたら、エレベータの動く部分全体の重心の上下もありませんから位置エネルギーの変化はありません。全体は上部の滑車で支えられていますから重力損失もありません。必要なエネルギーは動かしたり止めたりするために必要な運動エネルギー分だけで済みます。 宇宙エレベータではどのようにして昇るのでしょうか。想定されているクローラーは竹のぼりのようなものでしょうか。そうだとすると重力損失はありませんがしがみ付くためのエネルギーが余計に必要です。この場合、摩擦力がエネルギーを消費しないように素早く掴んで離すような工夫が必要でしょう。
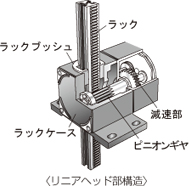
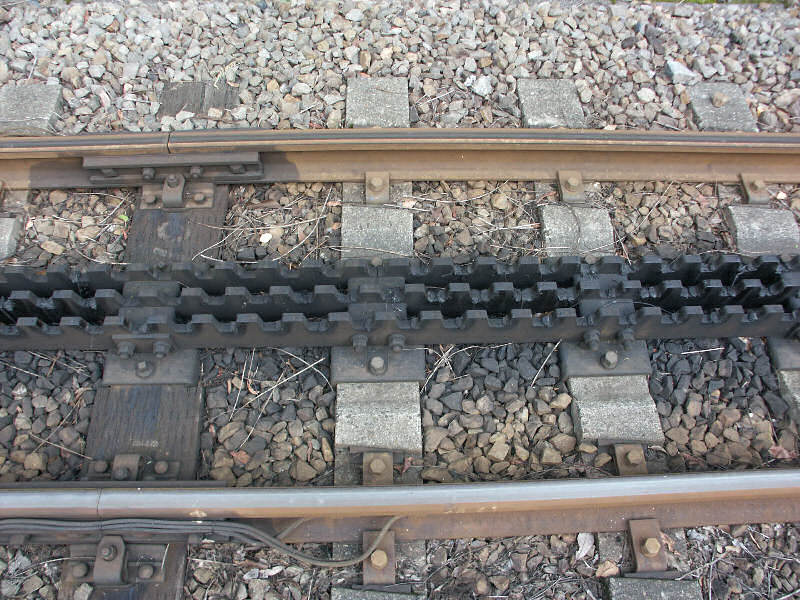
どうやら、ラックピニオン型の歯車で上ることが良いでしょう。ピニオンの回転を止めれば静止できますし、ゆっくり上っても重力損失はありません。
(改定) 2015年の記述で下線を付けたところは間違いでした。 (了)
戻る
|