�肪�Ƃ������܂���~��(v^_^)v�@�߂�܁[���I")
�f�W�^����]�v�̐���
������Ƃ����Â��Ă݂܂����I

�@���̊J���i�u���V���X���[�^�̐���j�ɕK�v�ɂȂ�A�}篐��삵�Ȃ���Ȃ�Ȃ��Ȃ�A�삭�邱�ƂɂȂ�܂����B�ǂ������Ȃ獡����g�������ȋ@�\�����Ă݂悤�ƁA������Ƃ����Â��Ă݂܂����B
�F�X���ɂ�����~���o�Ă��āA���ǂ͉E�ʐ^�̗l�Ȃ��̂ɂȂ�܂����B�@���\�g�����肪�������̂ŁA���\�����炭�s�̕i�ƈ��������Ȃ����炢�ɂȂ����Ǝv���Ă���̂ł����@
�R(~�`~�@)�m �ÁH�@�쓮�d���̓o�b�e���[�ŁA����������߂����̂��i���i300�~�j�Łi�^�ԁF2CR�A
�d��6V�A���`�E���d�r�j�����Ă����̂ŁA������g�����Ǝv�����̂����A�d�r�\�P�b�g������܂���B
�莝���̍ޗ���T�����Ƃ���ACR2�����`�E���d�r�z���_�[���������̂ŁA������g�����Ƃɂ��܂����B���������������Z���ł����A
�d�r��}������
�o�l�������Ȃ��Ă��A���\�����������܂��B
�@�ŏ��Ɏv����������́u1�b���ɓ��͂����p���X�𐔂��A�����rps�Ƃ��āA
60�{���Ă���rpm�����߂����v�ƒP���ȍ\�z�Ńv���O���������A���삳���Ă݂܂����B
�m���ɂ���炵����������܂������A���܂����ڕW����O��Ă��܂��B�i����200rpm�ȉ��̐��x�������I�j
�@�f�ڂ�����H�}�ƈႢ�܂����A���̎���]�M���̓}�C�R��IC��T1CKI
�i11Pin�j�ɓ��͂��A1�b��TMR0���v���X�P�[���l��
�ϐ��o�b�t�@�l�Ƃō�肾���A1�b���m��ATMR1�ɓ��͂����p�������v�����Ă��܂����B���R�ACCP�@�\�͎g�p���Ă��܂���B
�@�F�X���ׂ����ʁA�u���g���J�E���^�[�̉��p�v�ł��邱�Ƃ�������A���Z���@�ɂ����2������邱�Ƃ�������܂����B
���̈����قǏЉ���u1�b�Ԃɓ��͂����p���X���v�������v���@�ŁA�����ЂƂ́u1�����̃p���X���Ԃ��v�������v���@������܂����B
���҂͂��ꂼ���������Z��������A����Ⴂ��]���͌�҂̕��@���ǂ��Ƃ���Ă��܂��B
�܂�������]���̏ꍇ�͑O�҂̕����ǂ��݂����ł��B���ɍŏ��̐��삵�����̂� 10MHz�̃p���X����͂ł��A
�����rpm�\��������ƁA�Ƃ�ł��Ȃ����l�ɂȂ�܂����A���x��Good�ł����I������ڕW��]���͔�r�I�Ⴂ���Ȃ̂ŁA
��҂̕��@�Ő��삷�邱�Ƃɂ��܂����B
�@���āA1�������ǂ̗l�ɂ��Čv�����邩��Web�T�C�g�⏑�Ђ�����ƁA�唼��CCP�@�\�ɂ���u�L���v�`���[���[�h
�v���u�R���y�A���[�h�v���g���Ă���悤�ł��B����́u�L���v�`��-���[�h�v���g���܂��B������CCP�P
�i13Pin)�ƌ������͒[�q�������������܂��������������i�ݒ�ɂ��j�̃G�b�W��������Ɠ����ɁA
CCPR1L��CCPR1H�ƌ���8�r�b�g�~2=16�r�b�g�̃��W�X�^�[��TMR1�i16�r�b�g�j
�̓��e���R�s�[����܂��B����������Ɋ��荞����������܂��B����͂��̋@�\���g���܂��B
TMR1�̓��e��0�ɃZ�b�g���Ă����ATMR1���X�g�b�v���Ă����܂��BCCP1�̓��͒[�q�ɉ�]�Z���T�[�̐M�������܂��B
���̐M���̃G�b�W�ɂ��A�ŏ��̊��荞�݂�CCPR1L��CCPR1H�̓��e��0�ɂȂ�܂��B����Ɠ�����TMR1���X�^�[�g�����܂��B
���̊��荞�݂ŁATMR1���X�g�b�v�����܂��B���Ƃ́ATMR1�̃I�[�o�[�t���[���ϐ����ǂݎ��A
���L�̌v�Z�������܂��B
65536�@�~�@TMR1�̃I�[�o�[�t���[�@�{�@CCPR�PH��CCPR1L�i16�r�b�g�j�̓��e
���̒l���A���͂��ꂽ�p���X���ł��B���Ƃ�1�p���X�̎������|���āA�����t�������߂�Arps�����܂�܂��B
���Ȃ݂�TMR1�̓��͂��O�������i�����j�ɂ��Ă����AT1CKI�i11Pin�j���A
16MHz�̃N���b�N���M��̐M���ړ���Ă��܂��i��H�}�Q�Ɓj�B
���̐M�����v���X�P�[���[�l�u�S�v�����Ă��܂��BTMR1���v���X�P�[���l��
�~1�A�~2�A�~4�A�~8�A���ݒ�ł��܂����A���̒l���������قǐ��x���オ��܂��B�������A
(1/16MHz)�~2=125ns�i
TMR1�j �� �i1/16MHz�j�~4=250ns�i���C��Clock�j
�ƂȂ�A
���C���N���b�N��菬�����Ȃ�Ɠ������Ƃ�Ȃ��Ȃ�A�v���s�\�ɂȂ�܂��B�܂�TMR1����ɐݒ肷��ƍ��x�̓L���v�`���[�����܂����Ȃ��Ƃ���Ă��܂��B
�i��������Ƃ�����܂��E�E�E�j



�� �Z���T�[�R�l�N�^ �� �Z���T�[��
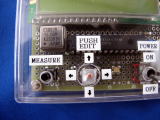

�� �v���ƕҏW�X�C�b�` �� �p���[�X�C�b�`
�� �v�����S�̊O��
�@�S�̂̑傫���́A93mm�~64mm�A����22mm�������̃|���J�{�l�[�g�ɓ����Ă��܂��B������ƕς�������ƂƂ��āA
�p�����[�^��ݒ肷�邽�߂̃X�C�b�`���A�ʏ�ł����5���^�N�g�X�C�b�`��p�ӂ���̂ł����A�㉺���E�{
PUSH�X�C�b�`����̂ɂȂ����W���O�X�C�b�`���g���܂����BLinKman������
�}���c�p�[�c����189�~�Ŕ����Ă��܂����B�ʎ����^�C�v�̂��̂ł����A���삷�镔�����Z���A��p�̃J�o�[�炵�����̂��̂���܂���B
�d���Ȃ��̂�5mm�p���A�N�����_�����H���āA������Ƃ��߂ɂ͂܂錊���J���č��A�㉺���E�̑�����
�g���A�^����2.1mm�̌��������A��2�̃��b�L����ʂ��APUSH�����Ƃ��đ��삵�܂��B
���͂��̕�������ԓ���A���ł�������ƂԂ���ƊO��܂��B�܂��t���܂ɂ���ƃ�2�̃��b�L�����������܂��B�߂�ǂ������̂��̂܂g���Ă��܂����A�����͒��������Ǝv���܂��B
�@ ���삷���ł͓��ɖ��Ȃ��s�Ȃ��A5�̃X�C�b�`���͂邩�ɕ֗��ł��B����͂��̑���m�u�����ǂ������Ǝv���܂��B�ȉ��́APOWER�X�C�b�`��ON�ɂ��A�W���O�X�C�b�`�̃Z���^�[PUSH���������тɕς�鑀���ʂł��B


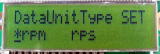
�@�N���� [PUSH] �A�Q�[�g���ԑI�� �B�P�ʑI��

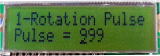
�C��r�@�\ON/OFF �D�@1��]������̃p���X���ݒ�

�E�@�^�]�ҋ@���
�G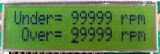 �@�F
�@�F
�C Compare Function �̃��[�h��'ON��I������� ���ɕ\�������ʂ��F�̉�ʂ��o�Ă��܂��B��������������Ƃ� Under�ݒ�l�̌����������Ƀu�����N���Ă����܂��B�ŏ�ʌ��܂ōs���A�����������������ƍ��x��Over�ݒ�l�̍ŏ������u�����N���܂��BOver�ݒ�l �̍ŏ㌅�܂ōs���A�������������N���b�N����ƁAUnder�ݒ�l�̍ŏ������u�����N���܂��B�t��������������ƁA�t�����Ƀu�����N�����ړ����Ă����܂��B�ύX�������������N������ԂŁA ������Ł{1�A������Ł|1����܂��B�ݒ�ł���͈͂͂��ꂼ��99999�܂łł��BUnder��Over�̐ݒ�l�͕K���A Under�l �� Over�l�Őݒ肵�ĉ������B���̊Ď��͎蔲���@(�-�;)�S(-_-;) ����... �@���ă\�t�g�ɓ���Ă��܂���B����A���̏��������藧���Ȃ��ꍇ�́A���F�ƗΐF�� �x��LED�͗���ON�ɂȂ�܂��B��]��[rpm]��Under�l�̏ꍇ�A�ΐF��LED���_�����܂��B�܂���]��[rpm]��Over�l �̏ꍇ�A���F��LED���_�����܂��BUnde�l����]����Over�l�̏ꍇ�́A������LED���������Ă��܂��Br�ݒ芮����ɁA�Z���^�[PUSH�������ƁA �D�̉�ʂɂȂ�܂��B
�@���ꂼ��̐ݒ���e�͓d����OFF�ɂ���������l�ɖ߂�܂��B����g�����}�C�R���ɂ�EEP-ROM������̂ŕۑ�����Ηǂ��̂ł����A����ς��Đݒ肷��͓̂����Ȃ̂ŁA�����ĕۑ��@�\���Ȃ��܂����B
�D�@�H
�@[�������v�̕\���̎��́A�D�̗l�������_��2�ʂ܂ŕ\�����܂��B�܂��u�������v�̎��͇H�̗l�������_��3�ʂ܂ŕ\�����܂��B
�@�܂��v���͕K���D�܂��͇H�̉�ʏ�ԂłȂ��ƍs���܂���B�v���\��Ԃ̉�ʂŁuMEASURE�v�X�C�b�`�������ƁA�v�����J�n����܂��B
�@�^�]�́uMEASURE�v�X�C�b�`�������Ă���Ԃ����s���܂��B���̃X�C�b�`�������Ă���ԁA��ʂ̉E���ɂ�����LED��
�T���v�����Ԃɍ��킹�ē_�ł��s���܂��B�X�C�b�`�����𗣂��ƁA�Ō�Ɍv���������e�̂܂ܕ\�����ێ����܂��B
�@���\���r����̂ɗp�����v����͉��L�̂��̂ł��B����20�N�ȏ�O�̂����ŁA�u���{�d�Y�V���|�H�Ƈ��i���F�V���|�H�Ƈ��j�v�А��̌v����ŁA
�����ɂ��Ă͉���I�ŁA���L���v�����s�Ȃ��A���x���}0.008%�}1digit�ƌ��������\�̂Ȃ��̂ł��B

���́FAC100-AC200V
����͈́F0.2�`99999rpm
�v���\�p���X���́F1Hz�`10kHz
�p���X���F30uS(min)
�M���d���F0.2V�`30Vp-p
�Z���T�[�F���n�A���C�nOK
���̑��F�A�i���O�o�͕t
�Z���T�[�p�d������

���{��Ɖ�]�vDT-5FV �� ��]�vDT-5FV


���������{��Z���T�[�s�b�N�A�b�v���ʼnE����DT-5FV�̃Z���T�[���ł��B�����āA���ɂ���̂�escap������DC�R�A���X���[�^
�ł��B
�@���}�̂悤�ɓ����Ɍv�����悤�Ƃ����Ƃ���A�{��̃s�b�N�A�b�v��DT-5FV�̃Z���T�[����o����ɉe������A���m�ȑ��肪�ł��܂���ł����̂Ōʂɐ��\���m�F���܂����B
���@360rpm�t�߂̌v��


�� 366.44rpm
���@500rpm�t�߂̌v��


�� 506.30prm
���@1,000rpm�t�߂̌v��


�� 1,012.64rpm
���@1,500rpm�t�߂̌v��


�� 1,532.77
���@2,000rpm�t�߂̌v��


�� 2,077.86
���@3,000rpm�t�߂̌v��


�� 3,054.56
���@4,000rpm�t�߂̌v��


�� 4,084.33
���@5,000rpm�t�߂̌v��


�� 5,029.65
���@7,000rpm�t�߂̌v��


�� 7,041.84
�@���\�`�F�b�N�ł�������Ǝv���܂����A���\�ǂ��l���v������Ă��܂��B�\�����p�ɂȂ�܂��B������g���Ď��̓u���V���X���[�^�̉�]������쐬����\��ł��B
�d�l�������Ă��郂�[�^�ɂ̓G���R�[�_����������Ă���̂ŁA���ۂ̏o�͎��ƃG���R�[�_���̗����������悤�Ǝv���Ă���A���̉�]�v���З͂�����Ǝv���Ă��܂��B
�@�v���O�����ɂ��Ă͂��܂�A
���ꂢ�Ƃ͌����܂��A����̓n�[�h�ʂŐF�X�ƕ��ɂȂ�܂����B�܂��W���O�X�C�b�`�ɂ��o��āA���ǎ���Ō��\�g�������ł��B�Z���T�[�s�b�N�A�b�v���͎��O�����ł��邽�߁A
���̃Z���T�[�Ȃǂ�ڑ����邱�Ƃ��ł��܂��B������PG�i�p���X�W�F�l���[�^�j����̐M�������Č������Ƃ���A50,000prm�t�߂�
��1%�̌덷������܂����B����́A�N���b�N���U����16MHz�̌덷�ł͂Ȃ����Ǝv���Ă��܂��B���������ǂ����̂��g�p���āA
�@�����Ό��ؕ������Ǝv���܂��B
{kind=link}