
�����`�b�v�}�C�R���EPIC��C������g�����w�K�T
�ʑ��p���T�[�̐���
�@�Q������Ԃ��̕ɂȂ�܂��B���܂肨���ɂ͂Ȃ�Ȃ��d�������\����Ă��܂������A�����ǂ����Ƃ�����̂ł́E�E�E�Ɗ肢�A�`�}�`�}���Ă��������Ԃ��ʂ��āA�O���Study ���ɃA�i�E���X���܂����u�ʑ��p���T�[
�v�삵�Ă݂܂����B���炭�uC�����v���痣��Ă���Ƃ�����������F�X�Ȃ��Ƃ�Y��Ă��āA��Ȃ������ɂ��ߑ����o�܂��B(�V�Lo�M)=3 ̩
�@����̓n�[�h�E�F�A�ƃ\�t�g�E�F�A�̗��ʂŋ�J���܂����B�܂��o�h�b�̕Ȃƌ������̂��������������悤�ȋC�����܂����I�H
(��_�)...�!?
�@�Ȃ�������A�A�b�v������H�}�Ȃǂ��ԈႢ�△�ʂȂ������邩������܂���B���̂�����͕����ƌ������Ƃł��e�͊肢�܂��B�ł�����w�E��A�h�o�C�X����K���ł��B�i���[���Ȃǒ��ڂł�OK�ł��j
�@ �����܂�̏ł����A�����ɏЉ����͎̂��l������ɐ��삵�����̂ŁA���ꐻ�삳��Ď��̂Ȃǂ̔�Q�ɂ����Ă������͈�ؐӔC�������܂���̂ŁA�������Ƃ������̂������A�����p���������B�ł�������p�Ƃ��ė��p���Ē�����K���ł��B
�Ȃɂ������܂������̑f�l�ł�����I
�@�̂��߂Ă������̎d���̒��ŁA���p���g���i50Hz�Ƃ�60Hz�j��1�T�C�N���̎w�肵���ʑ��p����
��ł����ނƌ������i������Ă��܂������A���̈ʑ��p���������H���O���ɗ���ł��܂����B���e��3���T���z�C�[���X�C�b�`�Őݒ肵�A�����p���X���������1���̂��̂ŁA���i���Ȃ��20���~���͂��Ă����ƋL�����Ă��܂��B
���H������ƁA��������CPLD���g���Ă��āA�����Ȃ���ǂ��o���Ă���Ȃ��[�Ɗ��S�������̂ł����B�ޗ��͂Ƃ������w�ǂ��u�Z�p���v�ƌ����̂����̎��̈�ۂł����B
�@�����̐��\�͂���قnj������Ȃ������̂ŁA���ꂭ�炢�̎��g���ł����
�o�h�b�ŏ\���ł���̂ł́E�E�E�Ǝv�������č���̐���ɓ��ݐ邱�Ƃɂ��܂����B�Ƃ��낪�E�E�E���\���Ȃ��Ƃ������玟�ƁE�E�E��������Ă���1�T���͔Y�݂܂����B
�@�ł��A�悤�₭1���@
�Ƃ��Ċw�K���e���A�b�v�ł��邱�ƂɂȂ����̂ł��Љ���Ē����܂��B�܂��܂����ǂ̗]�n������A���̃o�[�W�����v�悪���ɂ���܂��̂ŁA����̓\�[�X�̌f�ڂ͊��������Ē����܂��B�Ȃ��A�ڍׂ��m�肽�����́A���ڃ��[��������A�\�Ȕ͈͂ł��Љ�ł���Ǝv���܂��B
�܂��͑S�e�Əڍׂ��ʐ^�ŏЉ�܂��B�������̏�ł̍�Ƃł��B((^��^))�U ���
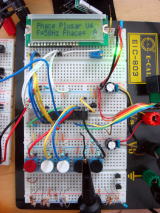

�@�@�@�@�@�� �}�C�R���u���[�h�{�[�h���@�@�@�@�@�� �X�C�b�`���암�@�@�@�@�@�� �����g���p���X�ϊ���H�@�@�@�@�@�@�� �t���\����
�@�����̗l�Ɂu�u���[�h�{�[�h�v���g���A���������ςɑg�ݏグ�܂��B��H�}���猩�Ă�����قǑ傰���Ȃ��̂͂Ȃ��Ǝv���܂����A�����ʐ^�̉E�[�ɂ���u�����g���p���X�ϊ���H
�v�ƌ����A�傻���Ȃ��̂�����܂����A�P�����R���p���[�^���g�`���`���Ă��邾���Ȃ̂ł����A���̐��`��H���o�h�b�ɂƂ��Ė��ŁA�����݂̉�H�ł��Ⴂ���g��
�̌v���Ō�������l���������Ƃ�����A���������ǂ��܂����B
�@�܂��ŏI�I�ɂ��p���X�̃G�b�W���~���������̂ł����A���������蕔���g�傷��Ǝ�U�����Ă���̂�������A���ꂪ�܂����l���ł���߂ɂ��錴���ŁA���̕ӂ�����ǒv���܂����B���ǁA�����g�`��PIC�ɑ��邱�Ƃɂ��܂����B
�g���K�[�ł����炱��ŏ\���ł��B��̎ʐ^���X�C�b�`���암�ɂT�̃X�C�b�`������܂����g�p����̂��S���ł��B�t���\�����́A�莝���̂��̂�2�s/16����
�̂��̂ŁA������ƕ�����Ȃ������̂ł����A�d���Ȃ�����ōs���܂����B�ق�Ƃ�20�������炢�~���������ł��B(�s���s)������
![]() �@�������
�@�������
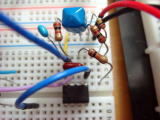
�@��H�}�����ĉ������B�ȑO�ɐ��삵����H�ƂقƂ�Ǔ������̂ł��B�𗬂��ʑ��[���������邽�߁A���^�g�����X�ō~�����A���g����������A�R���p���[�^IC
���]���͒[�q[+]�ɓ���Ă��܂��B����A���]���͒[�q[-]�ɂ�1/100�̓d�������āA�[���N���X�_�������Ă��܂��B�R���p���[�^�̏o�͂́A�����オ��Ɨ��������蕔�̃G�b�W�ɐU���g�����邽�߁A�ϕ��p�R���f���T��}�����ĐU����}���Ă��܂��B
�o�h�b�̕��ւ́A�^�C�~���O����������Ηǂ��̂ŁA�[���N���X�_�̐M�������������p���X�����Ă��܂��B���̐M�����O�����荞�ݒ[�q(Port-B0�j�ɓ��͂����܂��B�n�[�h�E�F�A�̃|�C���g�͂��ꂾ���ł��B
���Ƃ́A�����̗l�ȃX�C�b�`�Ɖt���\���������ł��B�p���X�o�͍͂��̂Ƃ���\�肪�Ȃ��̂ŁA���悻�Q�T�ʂr�ƌ����p���X���̐M�������W�b�N���x���ŏo���Ă��邾���ł��B
�@����\�t�g�E�F�A�͊���Ȃ��b�����ƌ������Ƃ������ċ�J���܂����B
I/O�̏�������A���g���̌v�����R�b���Q�[�g���J���āA���肷�����g�����R�������肱��ŁA���g���Ƃ��Ă��܂��B�܂�A���̃p���T�[���Œ肳�ꂽ���g���̋@��
�ł����g���܂���B���g�����ς������A��قǐ�������X�V�{�^���������āA�ēǂݍ��݂����܂��B
�@���̌�A�O��ݒ肵���ʑ��p�l��EEPROM������ǂݍ��݁ACCP���W�X�^�ɑ���A�J�E���^�l�i16�r�b�g�j
���v�Z���܂��B�����CCP�@�\�̈�ɂ���A�u�R���y�A�v���g���Ă��܂��B�[���N���X�M���������Ă��閈�ɁATMR1���X�^�[�g�����ACCP_1�̃��W�X�^�l�Ɣ�r���ē����ɂȂ�A�p���X�������Ă��܂��B
�@�ł�����̂́A�ʑ��p
�O�x���R�U�O�x�̂Ƃ���ł��B��͓����ʒu�Ȃ̂ł����A�Ӗ����Ⴂ�܂��B�ʏ�l������̂͂R�U�O�x�ɒB�����炷���Ɏ��̃J�E���^�삳���Ȃ���Ȃ�܂���B�x��Ă��܂��܂��Ƒ傫�Ȍ덷�ɂȂ�܂��B���̍l�����ł͌��E������܂��i�����ۂɂ��̒ʂ萻�삵���Ƃ���A
�R�Q�O�x�����E�ł����j�B�����ŁA�H�v�����̂��ʑ����P�W�O�x���炷���Ƃł��B�i���̏ڍׂ͍��̒i�K�ł͊��������Ē����܂��B�j
�@����A�[���N���X�M���̃p���X�ʼn�H�ɂ���������������ŁA������g���̃����W��10Hz�`200Hz
�ƌ����͈͂œ���ł��܂����B����ł͓����Ԃ����Ă����܂��傤�I
�@�d���𓊓�����ƁA���g���v���ɓ���܂��B���̊ԁi3�b�j�i�����o�[�W�����AGucciTech�̃��S��\�����܂��B���̌�A�v���������g���ƑO��̈ʑ��p�l��\�����܂��B
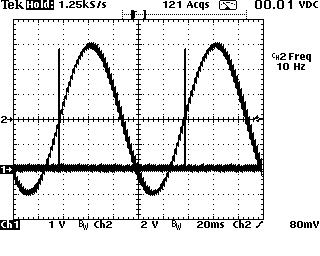
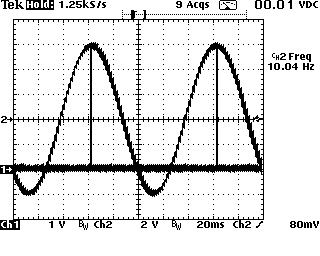
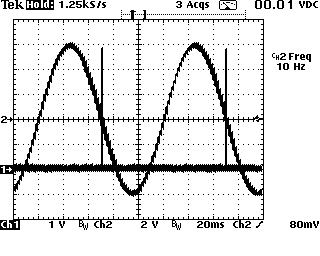
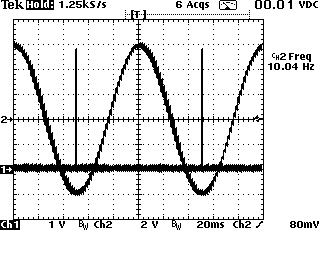
![]() �@���g��10Hz�@�ʑ��p�ݒ�Ɣg�`
�@���g��10Hz�@�ʑ��p�ݒ�Ɣg�`![]()
![]() �@���g��50Hz�@�ʑ��p�ݒ�Ɣg�`
�@���g��50Hz�@�ʑ��p�ݒ�Ɣg�`![]()
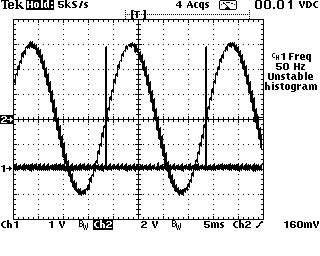
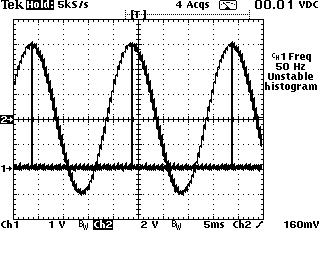
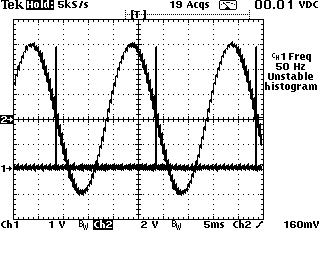
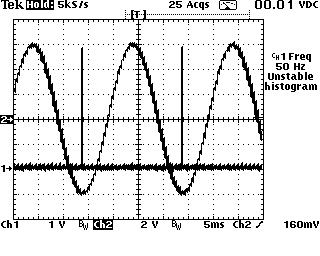
�Ȃ��A360�x��0�x�Ɠ����g�`�����Ă��܂��̂Ŋ����v���܂��B�܂��g�`�̐��������̂́A50Hz��25��S�̍��ŏo�̓p���X�������Ȃ����߃I�V���X�R�[�v���� �s�[�N�f�B�e�N�g�������āA������悤�ɂ������߂ł��B
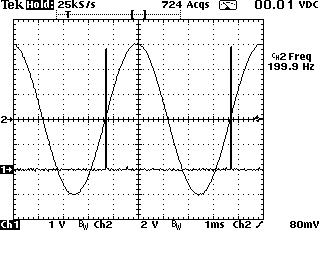
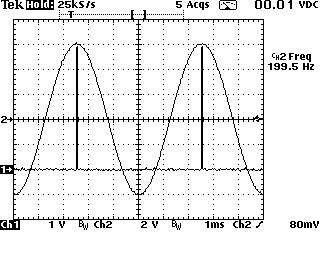
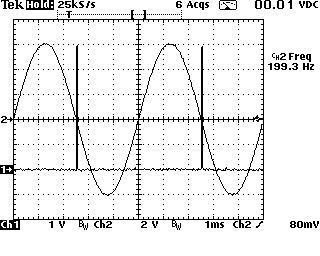
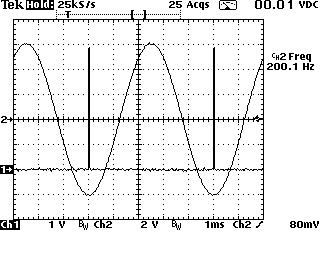
![]() �@���g��200Hz�@�ʑ��p�ݒ�Ɣg�`
�@���g��200Hz�@�ʑ��p�ݒ�Ɣg�`![]()
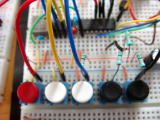
�@�ʑ��p�̈ʒu�́A��ʐ^�̉��t�X�C�b�`�ŁA�����ԐF�{�^������u�R���ڂ̐��l�ύX�v�A�u�Q���ڂ̐��l�ύX
�v�A�u�P���ڂ̐��l�ύX�v�A���̍��͖��g�p�ŁA�Ō�̉E�[�̉��t�X�C�b�`���u.�ҏW�v�{�^���ł��B�ŏ����ҏW�{�^���������܂��B����ƂP���ڂ̐��l���u�����N
���܂��B�ς��������̃{�^�����������тɃC�N�������g���܂��B������ƋÂ����̂��A��ɂR�U�O�ȏ�A������Ȃ��悤�H�v���Ă��܂��B�Ⴆ�R���ڂ��O���P���Q�̎��́A�Q���ڂ͂O�`�X�܂ŕω����܂����A�R���ڂ��R�̎��͂Q���ڂ͂U�܂ł����オ��܂���B�܂��t�ɁA�Q���ڂ��V�`�X�̎��A�R���ڂ͂Q�܂ł����オ��Ȃ��ƌ����H�v�����Ă��܂��B
�@�ݒ肪�I���ƍŌ�ɁA�u�ҏW�v�{�^���������܂��B����Ɩ{��͉��߂����g����ǂ݂ɍs���A�ʑ��p��EEPROM�ɕۑ������̂��A�ݒ�f���ďo�͂��o���܂��B
�@����͌��\�������Ԃ��������Ă��܂��܂����B���̎�Ȍ����̓n�[�h�E�F�A�̖��p���ɂ���܂����B�Ⴆ�A������EEPROM�Ƀf�[�^�������c����Ƃ́A�A�Z���u���ł͉����т�����̂ł����A�b����ŏ����̂͏��߂Ăł����B
�����Ȃnj��܂��Ƃ��Ȃ�ȒP�Ȗ��߂Ŏ������Ă��܂��B���̒ʂ�L�q����ICD-U40�Ńf�o�b�O�����Ƃ���A�������ޏu�ԂŃu���[�N�|�C���g���������A�������߂Ȃ����ƂɔY��ł��܂��܂����B�}篁AEEPROM�����̃v���O�����Ō����ď��߂āu�������ނƂ���Ńu���[�N�|�C���g��u���Ă͂����Ȃ�
�v���Ƃ�������܂����B����ɉ����A���܂��������߂����̌��ŁA�d����ON/OFF�����������A�f�[�^�������錻�ۂɔY�܂���܂����B���낢�뒲�ׂ����i�Ƃ��ɕ����Q�����ɗ������I�j�A���Z�b�g��H�ɖ�肪����ACR�����ł͂܂������Ƃ������B�Ώ��@�Ƃ��āATO92�^��
��p�̃��Z�b�gIC���g���܂����B���������l�i�����Ȃ��̂ŁA�͂��߂���g���悩�����ƌ�����Ă��܂��B(w�Q�|�G ����
�����ĔY�܂��ꂽ�̂��A�ʑ����o�M���ł��B�u�g�`���Ō�܂ŁA�g�債�ėǂ�����I
�v�E�E�E�ƌ���������O�̂��Ƃ����Ȃ��������߁A�\�t�g�E�F�A�ł�����撣���Ă��A���܂̍���Ȃ����Ƃ������܂����B
�B��A�u�C�C�[�W�����I�v�Ǝ����Ő�^�����̂��A�O�x�ƂR�U�O�x�̐�ڂ��ǂ�����Čv�����邩�H�Ⴆ���Q�O�OHz
���TmS�ł��B������P/�R�U�O����P�S��S�ł��B���Ɉʑ��p���R�T�X�Ɛݒ肳�ꂽ���A���̃X�^�[�g�ł����O�x�܂łɂ͂������P�S��S
��������܂���E�E�E�E���Ƒ��߂ɂЂ�߂��܂����B����������b����֗̕������v���m�炳�ꂽ�̂��A�ʑ��p�l�̌v�Z�ł����B�R�Q�r�b�g�N���X�̌v�Z���A�Z���u���ŏ����Ƒ�ςȂ��̂ɂȂ�܂�����������
�b�����I��߂��܂���ˁI( ߰�)( �_�)�݁�
�@���ɂƂ��Ă͌��\���ł����B������@�ɁA����������x�����߂����̂Ƀ`�������W�������Ǝv���܂��B����̈ʑ��p���T�[�͎��̃o�[�W�������v�悵�Ă��āA��̈ʑ��p��ݒ肵�āA��̏o�͂��o�����ƌ������̂ł��B����Ɏ��g���������������ƍl���Ă���܂��B����ɂ��Ă� �f�W�^���I�V���X�R�[�v���~�����I�_���Ă�����̂́AAEMC�Ђ�4ch-12bit,100MHz�̃f�W�^���I�V���łȂ��100���~���ł����E�E�E
{kind=link}