VHDL�ɂ���
�| �v���Z�X���ƃ^�C�~���O �|
���V�@�T�i
(H19.5.23)
�P. �����������Ə����������D
- VHDL�ɂ́C�u
����������
�v�ƁC�u
����������
�v������܂��D
- �u
architecture
�v�{�̂ɂ́C�u
����������
�v�����ɋL�q���܂��D
- ���ۂ̘_����H�́C��Ɂu
active�ȏ��
�v�ɂ��邽�߁C�{���u
����������
�v�ŕ\������̂����R�ł��D
- �u
����������
�v�ɑ��āC�u
����������
�v������܂��D
- �u
����������
�v�́C�\�t�g�E�F�A�́u
�����I�ȍ\��
�v��p���āC�u
�n�[�h�E�F�A�̃��f�����O
�v���s�����̂ł���C
�����������ɔ�ׁC�u
��蒊�ۓI�ȓ���
�v�ϓI�ɋL�q���邱�Ƃ��\�ł��D
- ���������u
�v���Z�X��
�v�̓����́C���́u
����������
�v���g�p����܂��D
- �Ⴆ�C�u
if��
�v��u
case��
�v�C�u
loop��
�v�Ȃǂ��C���̑�\�I�Ȃ��̂ł��D
- �u
����������
�v�C�u
����������
�v�Ƃ����̂́C�����܂�VHDL�́u
�\������͂��āC��������菇
�v���C
- �u
�������s
�v�C
���邢�́u
����
�v��\���Ă���̂ł���C
- �@�@�u
�M���������ɕω����邩�C���Ȃ���
�v
- ��\���Ă���̂ł͂Ȃ����ƂɁC���ӂ���K�v������܂��D
- ����
�g������H�̗��p���āC��̓I�ɐ������܂��傤�D
| entity
inverter
is |
|
port
( |
|
|
A |
: |
in |
std_logic; |
|
|
B |
: |
out |
std_logic�G |
|
|
C |
: |
out |
std_logic |
|
); |
| end
inverter; |
| architecture
Dataflow
of
inverter
is |
| begin |
|
B
<=
A; |
���������� |
|
C
<=
B; |
���������� |
| end
Dataflow; |
|
- �u
architecture
�v��2�̑�����C
- �@ B�@<=�@A;
- �@�@�@�ƁC
- �@ C�@<=�@B;
- �́C�Ƃ��Ɂu
����������
�v�Ƃ��ĉ�͂���܂��D
- �u
�M��B�ւ̑��
�v�́C�u
�M��A�̕ω�
�v����u
1���Ԍ�
�v�ɍs���܂��D
- ����C�u
�M��C�ւ̑��
�v�́C�u
�M��B�̕ω�
�v����u
1���Ԍ�
�v�C���Ȃ킿�C
- �u
�M��A�̕ω�
�v����u
2���Ԍ�
�v�ɍs���܂��D
- ���̂悤�ɁC�u
�M���ւ̑��
�v�́C�K�����������ɍs����Ƃ͌���܂���D
- �Ȃ��C�u
�x�����ԃ�
�v�̒l�́C�u
0
�v�ł���C�����I��
�x���͂���܂���D
- ���Ȃ킿�C��LVHDL�ł͉�H�̋@�\���L�q���Ă��邾���ł���C
- ��̓I�ȉ�H�́u
�x�����ԃ�
�v�̒l�ɂ��ẮC
�g�p����u
���C�u����
�v ��C
- �u
FPGA�̎��
�v �ȂǁC�u
�_������
�v�̌��ʂɂ�茈�܂�܂��D
- �u
�e�X�g�x���`
�v�ȂǂŁu
0�ȊO�̒x����
�v��ݒ肷��ɂ́C�ȉ��̂悤�ɋL�q���܂��D
|
B
<=
A after 5ns; |
|
|
C
<=
B after 10ns; |
|
- ����́C�u
�M��A
�v���ω����āu
5ns��
�v�Ɂu
�M��B
�v���ω����邱�Ƃ�\���Ă��܂��D
- ���l�ɁC�u
�M��B
�v���ω����āu
10ns��
�v�Ɂu
�M��C
�v���ω����܂��D
�Ȃ��C2�̑�����́u
�ʒu�i�O�E��j
�v����ꊷ���Ă��C�u
����
�v�ł��邱�Ƃ͖��炩�ł��D
�Q.�@�v���Z�X���ɂ��āD
- ��ɏq�ׂ��悤�ɁC�u
architecture
�v�{�̂ɂ́C�u
����������
�v�����ɋL�q���܂��D
- ���̗�Ɏ����悤�ɁC�v���Z�X�����܂܂��ꍇ���C
- �@�@process(CLK)
����
end process�G
- �܂ł̋L�q���C1�́u
����������
�v�Ƃ݂Ȃ����Ƃ��ł��܂��D
| signal
TMP
:
std_logic_vector(3
downto
0); |
|
|
|
|
process
(CLK) |
�b |
|
begin |
�b |
|
|
if
(CLK'event
and
CLK = '1')
then |
�b |
|
|
|
if
TMP =
"1001"
then |
�b |
|
|
�@ |
|
TMP <=
"0000"
; |
�b ���������� |
|
|
|
else |
�b |
|
|
|
|
TMP <= TMP + 1; |
�b |
|
|
|
end if
; |
�b |
|
|
end if
; |
�b |
|
end process
; |
�b |
|
�@ |
|
|
COUNT <= TMP; |
�@�@���������� |
| end
Behavior; |
|
- ���������āC�M���u
COUNT
�v�ւ̑�����̈ʒu�͂ǂ��ł��悭�C
- ���̐}�̂悤�ɁC�u
�v���Z�X��
�v�Ƃ��̈ʒu����ꊷ���Ă������ł��D
|
signal
TMP
:
std_logic_vector(3
downto
0); |
|
|
|
|
COUNT <= TMP; |
�@�@���������� |
|
�@ |
|
|
process
(CLK) |
�b |
|
begin |
�b |
|
|
if (CLK'event and
CLK = '1') then |
�b |
|
|
|
if
TMP = "1001"
then |
�b |
|
|
�@ |
|
TMP <= "0000"
; |
�b ���������� |
|
|
|
else |
�b |
|
|
|
|
TMP <= TMP + 1; |
�b |
|
|
|
end if
; |
�b |
|
|
end if
; |
�b |
|
end process; |
�b |
| end
Behavior; |
|
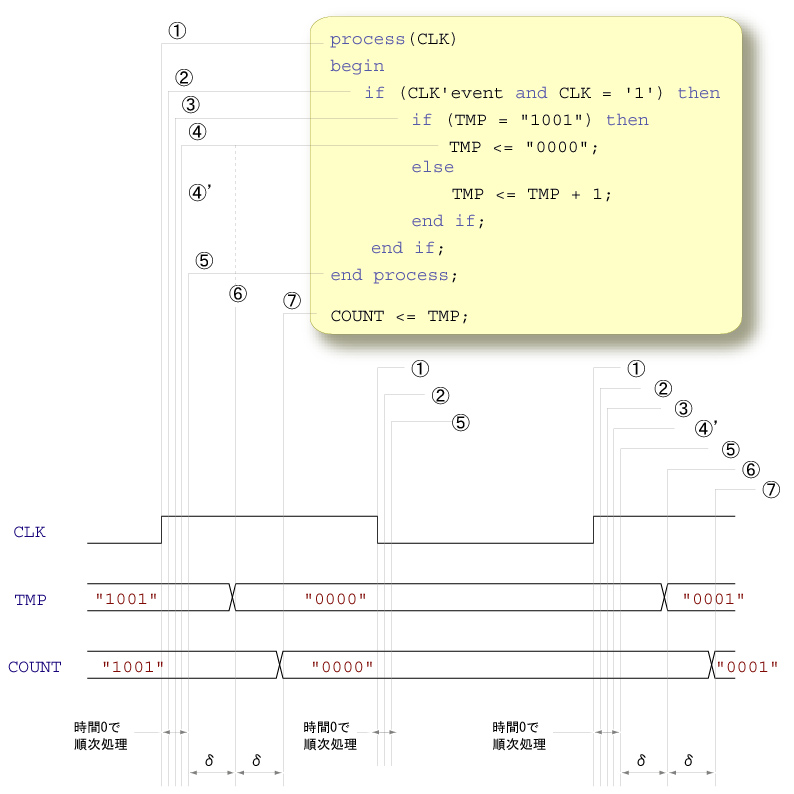
- ���ɉ��̐}��p���āC
����������
���L�q����
�v���Z�X��
��
�^�C�~���O
�̊W�ɂ��āC
- �������Ă݂܂��傤�D
- ���̗�́C
- �@process(CLK)
����
end process;
- �܂ł̂P��
�v���Z�X��
�ƁC
- �@COUNT <= TMP;
- �Ƃ����P�̑�����ō\������Ă��܂��D
- ���Ȃ킿�C�Q�́u
����������
�v���܂܂�Ă��܂��D
- �u
�v���Z�X��
�v����̃J�b�R���́u
�M��
�v���u
�Z���V�e�B�r�e�B�E���X�g
�v�ƌĂсC
- ���̒l���ω������Ƃ��C���̃v���Z�X���u
�A�N�e�B�u
�v�ƂȂ�C�A�`�D�̏������s���܂��D
- �A�ŁCCLK�̕ω����u
�������
�v�ł���ꍇ�́C�B�ȍ~�̏������s���܂��D
- ����C�u
��������
�v�ł���ꍇ�́C�D�Ɉڍs���C�v���Z�X�́u
�X�^���o�C���
�v�ƂȂ�܂��D
- �B�ł́C�u
�M��TMP
�v�̏�ԂׁC���̒l���u
"1001"
�v�̂Ƃ��́C�u
���Ԍ�
�v�C
- �u
�M��TMP
�v��
�u
"0000"
�v��������悤�C�X�P�W���[�����O���s���܂��D
- ����C�u
�M��TMP
�v�̒l���u
"1001"
�v�ȊO�̂Ƃ��́C
�u
�M��TMP
�v�̒l�ɁC
- �u
1�����Z�����l
�v���u
���Ԍ�
�v�ɑ������悤�C�X�P�W���[�����O���܂��D
- �u
�X�P�W���[�����O
�v���I�������C�D�Ɉڍs���C�v���Z�X�́u
�X�^���o�C���
�v�ƂȂ�܂��D
- �����Łu
�̒l
�v�́u
0
�v�ŁC�u
�x���͂Ȃ�
�v�̂ł����C�u
�v���Z�X���I��
�v������ɁC
- ������s���邱�Ƃɒ��ӂ��ĉ������D
�R.�@Behavior ���x���� Register Transfer ���x���D
- �O�߂�VHDL�́u
architecture�̎d�l
�v�́C�u
Behavior
�v�ƂȂ��Ă��܂��D
- �g�b�v�_�E���v�ł́C�܂��u
Behavior���x���̋L�q
�v���s���C�V�X�e���̑S�ʓI�ȋ@�\���m�F���܂��D
- �u
Behavior���x��
�v�̃V�~�����[�V�����ł́C
������u
�C�x���g�E�h���u��
�v�Ƃ�����@�ɂ��C
- �u
�M������̃^�C�~���O
�v�������I�Ɍv�Z���܂��D
- �Ⴆ�C�M���́u
CLK
�v���ω������Ƃ��C�u
end process;
�v�܂ł̏������C�u
����0
�v�ŏ����Ɏ��s���܂��D
- �������C���̂悤�ȏ����́u
�\�t�g�E�F�A�ɂ��V�~�����[�V����
�v��Ő���������̂ł��D
- �Ⴆ��10�i�J�E���^�ŁC�u
�M����TMP
�v�̒l���Ăяo���C����Ɂu
1�����Z
�v���邽�߂ɂ́C
- 4bit��1bit�̉��Z�ɔ������Z���Ԃ��K�v�ł��D
- �Q�[�g�x�������ۂ́u
�n�[�h�E�F�A
�v�Ŏ����ł�����̂ł͂���܂���D
- ���Ȃ킿�C������e�X�g�x���`��ŁC�u
����d�l
�v�Ɋ�Â��_�����{�I�ȃ^�C�~���O�Ɋւ���
- �V�~�����[�V�������s���̂��ړI�ƂȂ�܂��D
- �u
Behavior���x��
�v�̌����I����ƁC
�u
VHDL�̃��C�u����
�v����p���āC
- �u
Register Transfer���x��
�v�̋�̓I�ȉ�H�\���ɕϊ����C�����̃^�C�~���O�������Ɍ����܂��D
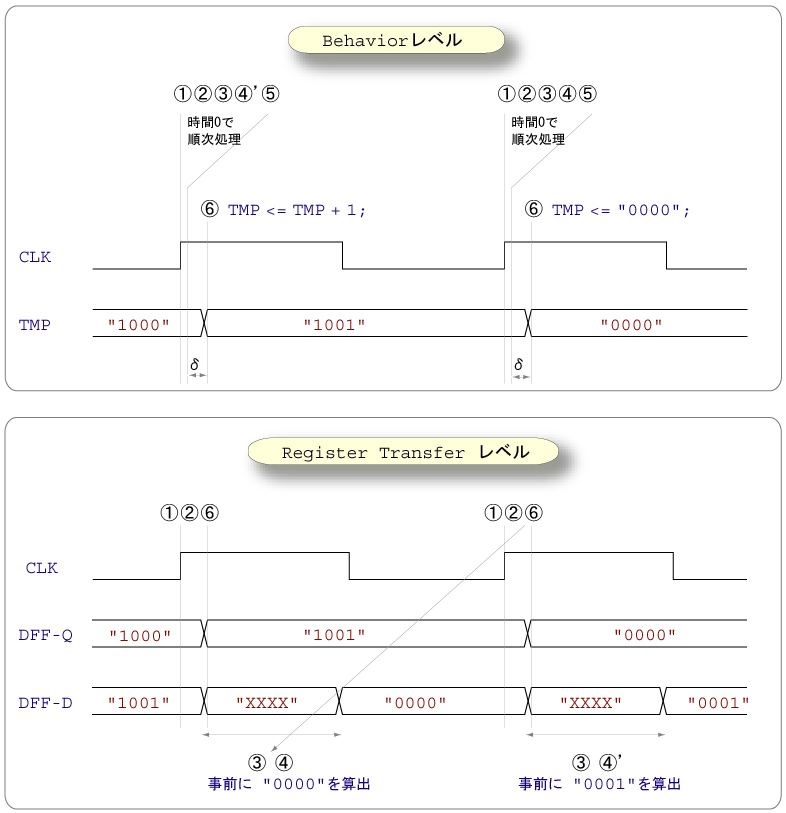
- ���̐}��p���āC�u
Register Transfer ���x��
�v�̉�H�̓���ɂ��Đ������܂��傤�D
- �u
Behavior���x��
�v�ł́C�N���b�N�̗�����肪�u
���ׂĂ̋N�_
�v�ƂȂ��Ă��܂����D
- �u
�M��TMP�ւ̑��
�v�́C�N���b�NCLK�̗�����肩��u
���Ԍ�
�v�ɍs���܂��D
- �Ƃ������Ƃ́C�u
�M��TMP�̒l
�v�́C�ق�1�N���b�N�O�ɁC���łɊm�肵�Ă��邱�ƂɂȂ�܂��D
- �u
RT���x��
�v�ł́C�u
�M��TMP�̒l
�v���m�肵�����_���u
�N�_
�v�Ƃ��܂��D
- ���Ȃ킿�C�u
TMP�̒l���`�F�b�N
�v������C�u
TMP�̒l��1�����Z
�v���鏈�����C
- �قځu
1�N���b�N�O
�v����J�n���C
���̌��ʂ��C�u
�t���b�v�t���b�v
�v�́u
D-FF
�v��p���āC
- �N���b�N�u
CLK
�v�̗������Ŋm�肵�܂��D
- �u
D-FF
�v�̉����͔�r�I�����̂ŁC�u
Behavior���x��
�v�ɋ߂��V�~�����[�V�������ʂ������܂��D
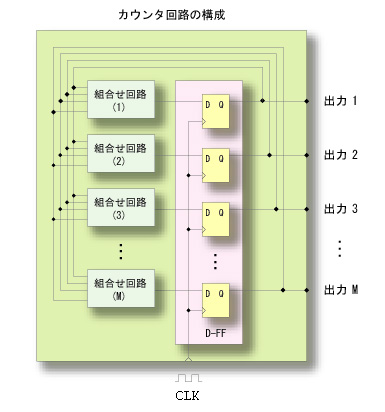
- �u
RT���x��
�v�̉�H�v�ł́C�u
TMP�̒l���`�F�b�N
�v������C�u
TMP�̒l��1�����Z
�v���鏈���́C
- ���ׂāu
�g������H
�v�Ŏ������܂��D
- ���Ȃ킿�C���̐}�Ɏ����悤�Ɂu
1�N���b�N�O��TMP
�v�̒l���u
�g������H
�v�ɓ��͂��C
- ���̏o�͂��u
D-FF
�v��p���āC�g�`���`���܂��D
- ���̂悤�ȉ�H�\���ɂ��C�u
D-FF
�v�̏o�͂́C�u
Behavior���x��
�v�̐v�Ɠ��l�C
- �u
CLK�̗������
�v����ɕω�����M���ƂȂ�܂��D
�S.�@�v���Z�X���ɂ��g������H�D
- ���ׂẮu
�g������H
�v�́C�u
����������
�v�ŕ\���ł��܂����C
- �����u
����������
�v���g����
�u
�v���Z�X��
�v��p���ċL�q����邱�Ƃ�����܂��D
- �u
if-else��
�v��
�u
case��
�v����p���āC��H�̋@�\��₷���\�����邱�Ƃ��ł��邽�߂ł��D
- ���̂Ƃ��C�ȉ���2�_�ɒ��ӂ���K�v������܂��D
- �@
�u
�Z���V�e�B�r�e�B�E���X�g
�v �Ɂu
���ׂĂ̓��͐M��
�v ���C
����Ȃ��L�q���邱�ƁD
- �A�@�u
���͂̂��ׂĂ̏��
�v�ɑ���o�͂̒l���C����Ȃ��L�q���邱�ƁD
- �u
���̏�������������Ȃ��Ƃ�
�v�C���͂̕ω��ɏo�͂��������Ȃ����Ƃ�����C
- ���ʓI�Ɂu
���b�`�@�\
�v�����ߍ��܂�Ă��܂����Ƃ�����̂ŁC���ӂ��K�v�ł��D
- �v���Z�X���́u
�Z���V�e�B�r�e�B�E���X�g
�v�́C���̐M�����u
�ω�
�v�����Ƃ��C
- ����ȉ��́u
����������
�v�����s����܂��D
- ���������āC��L�@�ƇA�̏�������������Ă���C�u
���͐M���̕ω�
�v�ɑ��C
- �K���u
�o�͐M���ւ̑��
�v���s���邽�߁C�����I�Ɂu
�x����H
�v���\������܂��D
- �Ƃ��낪�C�u
���͐M�����ω�
�v�����C�u
�o�͐M���ւ̑��
�v���s���Ȃ��ꍇ�́C
- �u
�v���Z�X
�v�I����C�����I�Ɂu
�X�^���o�C���
�v�ƂȂ��Ă��܂��̂ŁC���͐M���ɒǐ��ł��܂���D
- ���̂��߁C���́u
�o�͂̒l
�v��ێ����邽�߂́u
���b�`��H
�v ����������Ă��܂��킯�ł��D
- �u
�v���Z�X��
�v ��p���āu
�g������H
�v ���L�q����ꍇ�́C��L�u�Q����
�v �����Ă��邩�C
- �K���m�F����悤���ĉ������D
�T.�@�M���ƕϐ��ɂ��āD
- �����ł́C�u
�M���@signal
�v�ƁC�u
�ϐ��@variable
�v�̈Ⴂ�ɂ��Đ������܂��D
- �������������ʂ��C�u
���̕\
�v�Ɏ����܂��D
|
VHDL |
���ԓI�v�f |
����\�� |
�Ӂ@�� |
| �M�� |
signal |
���� |
<= |
�n�[�h�E�F�A�I |
| �ϐ� |
variable |
�Ȃ��i���Ԓl�j |
:= |
�\�t�g�E�F�A�I |
- �u
�M��
�v�́C�u
�z��
�v��u
D-FF
�v�ŕ\�����u
�n�[�h�E�F�A
�v�ł��D
- �u
�������
�v�ɂ��u
�X�P�W���[�����O
�v���s���C
���̒x���i0���܂ށj�̌�ɁC
���̒l�͕ω����܂��D
- ����́u
�ϐ�
�v�́C�u
�R���p�C�����̃\�t�g�E�F�A����
�v�ŗ��p�����ꎞ�I�ȕϐ��ł���C
- �M���̂悤�ȁu
����
�v�������Ȃ����Ƃɒ��ӂ��ĉ������D
�U. �܂Ƃ߁D
- �{�����ł́C�u
VHDL
�v�Ŏg�p�����u
�v���Z�X��
�v�Ƃ��́u
�^�C�~���O
�v�̊W�𒆐S�ɉ�����܂����D
- �u
VHDL
�v�́C�u
�\�t�g�E�F�A
�v�I�ȗv�f�ƁC�u
�n�[�h�E�F�A
�v�I�ȗv�f�����˔���������ł���C
- ���̗��p���l�͋ɂ߂č����̂ł����C��������ʂ�����ƌ����Ă��܂��D
- �{�������C�����̈ꏕ�ƂȂ邱�Ƃ�����Ă��܂��D
- �Ȃ��C�u
���
�v��u
�������₷���L�q
�v������܂�����C���[�����ł��A������������K���ł��D