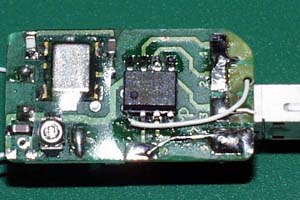
 受信機内部は 3V で動作している。 PIC もその電圧で動作可能だが、マグネットアクチュエータドライバは PIC からの出力でコイルを直接駆動する。 PIC の電源電圧は高いほうがいい。そこで PIC への電源だけ Li-Ion 電池から直接供給するようにした。ジャンパ線で PIC の 1 番ピンに接続されているのがその配線。
受信機内部は 3V で動作している。 PIC もその電圧で動作可能だが、マグネットアクチュエータドライバは PIC からの出力でコイルを直接駆動する。 PIC の電源電圧は高いほうがいい。そこで PIC への電源だけ Li-Ion 電池から直接供給するようにした。ジャンパ線で PIC の 1 番ピンに接続されているのがその配線。それぞれを時分割で実行しているため、読み込み時間が多くなるとその分マグネットアクチュエータドライバの PWM 出力の時間が少なくなってくる。そこでスロットルのパルス入出力を同時に行うようにプログラムを変更し、マグネットアクチュエータドライブ出力の時間をできるだけ多くなるようにした。
受信機内部は 3V で動作している。 PIC もその電圧で動作可能だが、マグネットアクチュエータドライバは PIC からの出力でコイルを直接駆動する。 PIC の電源電圧は高いほうがいい。そこで PIC への電源だけ Li-Ion 電池から直接供給するようにした。ジャンパ線で PIC の 1 番ピンに接続されているのがその配線。
スピードコントローラへの出力コネクタのみを残し、他の JST コネクタは基板から取り去ってしまった。マグネットアクチュエータへの出力は空いたスペース(画像裏側)にピンコネクタを取り付けた。
マグネットアクチュエータドライバを含む改造受信機は 2.2g と改造前に比べて 0.4g 軽くなった。マグネットアクチュエータドライバを外付けしなくて済む分軽量化の効果はもっと大きい。軽量な飛行機を作りたいという思いが、改造への意欲と PIC の勉強を加速させてくれる。
マグネットアクチュエータを繋ぎ、スピードコントローラをセットして動作テストを行った。自作したスピードコントローラはすでに飛行機に搭載してしまったため、テストでは小黒さんに作ってもらったものを繋いでいる。動きもいいようだ。スピードコントローラも受信機と一緒にできれば軽量化が一層加速する。早くそうできるように PIC プログラミングの腕を磨かなければ・・・。
この改造は後の赤外線受信機にもそのまま応用できそうだ。赤外線受信機では更なる軽量化を目指したい。