 空中配線したらこんなに小さくできた。しかも驚きの軽さだ。面実装タイプのパワー MOS FET は小粒だが、本来基板に取り付けて 1 インチ角の銅板面積があれば 12A もの最大電流に耐える。しかも ON 抵抗は 11 ミリオームとこの手の FET にしては群を抜いた低抵抗である。 1A も流さないインドアエアプレーンでは空中配線でも十分だ。
空中配線したらこんなに小さくできた。しかも驚きの軽さだ。面実装タイプのパワー MOS FET は小粒だが、本来基板に取り付けて 1 インチ角の銅板面積があれば 12A もの最大電流に耐える。しかも ON 抵抗は 11 ミリオームとこの手の FET にしては群を抜いた低抵抗である。 1A も流さないインドアエアプレーンでは空中配線でも十分だ。前回テストした PIC16F84A から今回書き込む PIC12C509A へのプログラムの移植はマグネットアクチュエータドライバの時に苦労した甲斐あって、比較的楽にできた。幸い PIC と同サイズの面実装タイプの FET を使うので両方を背中合わせに貼り付けて、その周りにチップコンデンサを立体配線した。回路図の中のショットキダイオードはモータ側に取り付けるようにした。
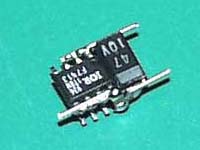
空中配線したらこんなに小さくできた。しかも驚きの軽さだ。面実装タイプのパワー MOS FET は小粒だが、本来基板に取り付けて 1 インチ角の銅板面積があれば 12A もの最大電流に耐える。しかも ON 抵抗は 11 ミリオームとこの手の FET にしては群を抜いた低抵抗である。 1A も流さないインドアエアプレーンでは空中配線でも十分だ。
実装するために JST コネクタを付けた電源ケーブルと、受信機に接続するケーブルを取り付けたら、本体よりケーブルのほうが重いという皮肉な結果となった。必要最小限度の部品で組み立てた結果だが、実際にモータをつないで受信機にセットし、送信機のスロットルを操作してみたところ、なかなかいい操作感覚だ。 22 ステップの PWM はとても滑らかに回る。これなら飛行機に実装しても使えそうだ。この画像なら大きさがよく判る。
初心者レベルのプログラムなどダウンロードして PIC に書き込むような物好きはいないと思うが、上記 PIC12C509A に書き込んだ micro01 スピードコントローラ HEX ファイル(3KB) を用意してみた。
低消費電力のモータユニットと組み合わせてインドアエアプレーン A-1 に搭載してテストフライトを行う。