|
|
|
|
動力と電線ケーブルとブレーカと電磁接触について

| 動力容量[KW] | 定格電流[A] | MCB-FRAME[A] | MCB-TRIPP[A] | サーマル設定[A] | 使用電線[sq] | 電線容量[A] | 電磁開閉器[A] | 始動方法 | Δ始動電流[A] | Y始動電流[A] |
| 0.2 | 1.2 | 30 | 5 | 1.3 | 2 | 27 | 20 | 直入 | − | − |
| 0.4 | 2.1 | 30 | 5 | 2.1 | 2 | 27 | 20 | 直入 | − | − |
| 0.75 | 3.7 | 30 | 10 | 3.6 | 2 | 27 | 20 | 直入 | − | − |
| 1.5 | 6.4 | 30 | 15 | 6.6 | 2 | 27 | 20 | 直入 | − | − |
| 2.2 | 9.1 | 30 | 20 | 9 | 2 | 27 | 20 | 直入 | − | − |
| 3.7 | 15 | 30 | 30 | 15 | 3.5 | 37 | 32 | 直入 | − | − |
| 5.5 | 22 | 50 | 50 | 22 | 5.5 | 49 | 50 | 直入 | 32 | 20 |
| 7.5 | 29 | 100 | 60 | 29 | 8 | 61 | 60 | 直入 | 32 | 20 |
| 11 | 44 | 100 | 100 | 42 | 14 | 88 | 80 | Υ-Δ | 60 | 32 |
| 15 | 55 | 100 | 100 | 54 | 22 | 115 | 100 | Υ-Δ | 60 | 32 |
| 18.5 | 67 | 225 | 125 | 67 | 22 | 115 | 135 | Υ-Δ | 80 | 32 |
| 22 | 85 | 225 | 150 | 82 | 38 | 162 | 135 | Υ-Δ | 100 | 32 |
| 30 | 110 | 225 | 200 | 105 | 60 | 217 | 150 | Υ-Δ | 135 | 50 |
| 37 | 130 | 225 | 225 | 125 | 60 | 217 | 200 | Υ-Δ | 135 | 50 |
| 45 | 164 | 400 | 300 | 150 | 100 | 298 | 230 | Υ-Δ | 150 | 60 |
| 55 | 195 | 400 | 400 | 180 | 100 | 298 | 260 | Υ-Δ | 200 | 80 |
| 75 | 267 | 600 | 500 | 250 | 150 | 395 | 350 | Υ-Δ | 260 | 100 |
| 90 | 316 | 600 | 600 | 330 | 150 | 395 | 450 | Υ-Δ | 260 | 100 |
| 110 | 384 | 600 | 600 | 330 | 200 | 469 | 450 | Υ-Δ | 350 | 150 |
| 135 | 466 | 800 | 700 | 500 | 250 | 556 | 660 | Υ-Δ | 350 | 150 |
● 11KWモータで、Y-Δ始動の結線を行った場合、電線の太さを1サイズ小さくできることがある。[※要検討]
● 三相5.5kW、定格電流22Aとは、全負荷運転して22A流れる電流と、解釈しても問題ない。
● モータの電流は、有効電力で規定し、電流は、(出力[KW] / (力率×効率)) / (√3×電圧)で求められる
ちなみに、簡易的に、3.7KW以上のモータでは、力率0.8、効率0.9で求めると、定格電流に近い値になる。
● モータの回転数(同期速度)は、「周波数 f[Hz]」と「極数 P」とすると、回転数 N は、
で求められる
● 回転数は周波数に比例して、電流に反比例して、大きくなる
● Y-Δ始動は定格電流に対し、突入電流は、1/√3 になり、相関電流は、1/3 になる。
◆ Y-Δ回路例
● 一般的な3接触器を用いたY-Δ回路例
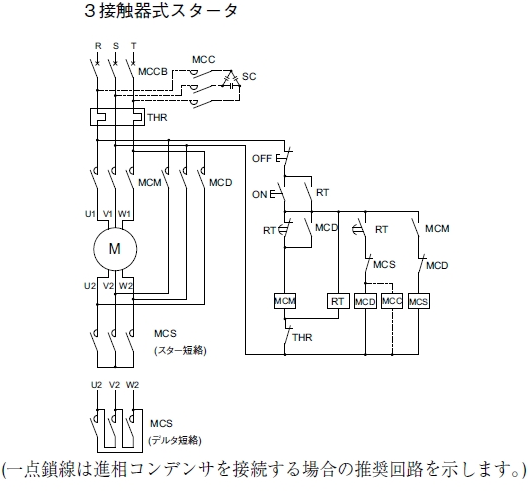
大きな出力を出すモーターは始動電流も大きくなります。その為、ブレーカーやマグネット、サーマルなどもサイズが大きくなります。スペースも取るので出来れば始動電流値を小さく抑えたいものです。
その為始動時になるべく始動電流を抑えるために、(Y)結線して、各相の巻線に電源電圧の1/√3に等しい電圧をかけることにより、始動電流を小さくしています。
スター ⇒ MCM+MCS
デルタ ⇒ MCM+MCD
モーターが回転し加速すれば、デルタ(Δ)結線に切り替えて通常運転に入ります。モーターを始動してから、規定の回転速度になるまでの時間を始動時間といい、この時間に合わせて、スター(Y)用の電磁接触機を開き、デルタ(Δ)用の電磁接触機に切替ます。この時限設定には、スターデルタタイマーを使い切り替えます。
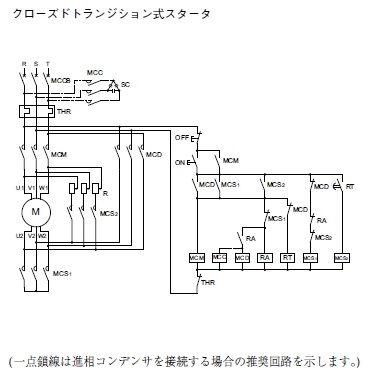
● 2接触器式とクローズドトランジション式のY-Δ回路例
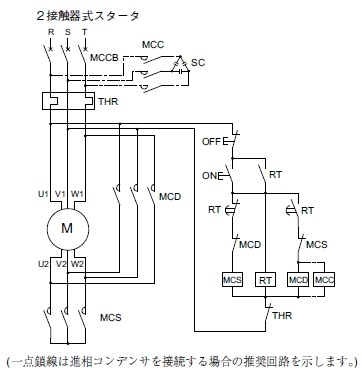
スター用(MCS またはMCS1) とデルタ用(MCD) 電磁接触器間は必ず電気的インタロックを設ける必要があります。
3 接触器式は一般的に使用され、モータの停止時には、モータの巻線に電圧が印加されないので、漏れ電流による絶縁劣化を抑制できます。
2 接触器式は、経済的ですがモータの停止中でも巻線に電圧が印加されるので、消火設備など休止時間の長い用途には適しません。
クローズドトランジション式はスターからデルタへの切換時にモータが電源から切り離されないので、突入電流および電圧降下を抑制できます。
◆ 直入れとY-Δの比較
| 始動方法 | 始動時(スター用電磁接触器) | 運転時(デルタ用電磁接触器) | |||||
| 指導電流 | トルク | 接点電流 | 接点電圧 | 前負荷電流 | 接点電流 | 接点電圧 | |
| 直入れ | 6 Im | 1.5 T | 6 Im | Em/√3 | Im | Im | Em/√3 |
| Y-Δ | 2 Im | 0.5 T | 2 Im | Em/√3 | Im | Im/√3 | Em |
注1:Im:モータをΔ結線した場合の全負荷電流 、 Em:線間電圧 、 T:定格トルク(トルクは推定値)