|
|
|
|
昔の電動ドライバを 今風+α に改造!

もう20年経つかな?・・・有名な「M社」(家電の方が有名)系列の会社で売られていた充電式電動ドライバーのバラバラにした残骸を倉庫から引っ張り出し、最近高性能になった半導体を使い、次の様な改造を行いましたので報告いたします。
- 速度制御ができること
- スタートレバーを離すと、ブレーキが利くこと
- トルクを検出するとブレーキが利き、停止すること
- 正転/逆転ができること
- 回路構成はドライバーの中に入る事を想定し、小さいこと
- 回路の誤動作はしないこと
- 発熱は規定(触れるくらいまで)以上、しないこと
- 過酷な使用に耐えること
コメント:
当たり前の項目が、「4と6」で、今時の仕様があるのは、「1と2と5」です。
あまり見かけないないのが「3」です。
それでは、グッチーテックが実施する改造記録をまずは見て下さい!
 ← 全体像です。
← 全体像です。
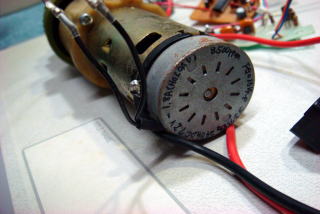
DC7.2Vのモータとギヤ部、チャック部のアセンブリ品
速度を検出するエンコーダ部です。出力波形は下を参照して下さい
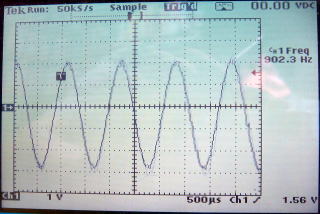
一番遅い速度にした時のエンコーダ出力波形。 電圧軸:1V/div、時間軸:500uS/div
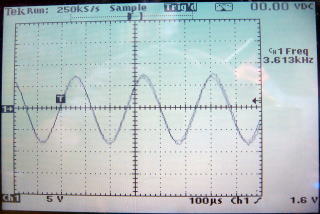
一番早い速度にした時のエンコーダ出力波形。 電圧軸:5V/div、時間軸:100uS/div


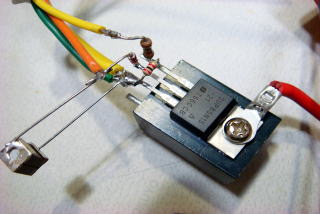
左が始動スイッチ、右が正転/逆転切り替えスイッチ。回路は始動スイッチをON→OFFにするとブレーキが利く様配線されています。
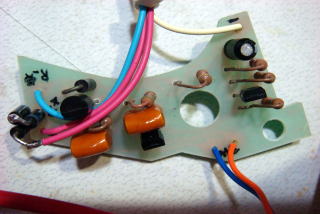
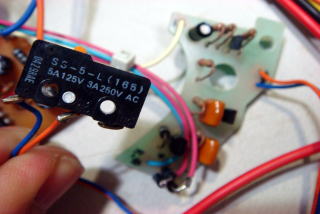
トルク検収回路は誤動作防止に結構凝っています。面実装部品を使えばかなり小さくなります。
このスイッチは何処に取り付けるのか?それは、ドライバーのメカ構造によります。そういったドライバは私の知っている国内メーカーは3~4社あり、主に工場のラインで使用していて、あまり身近では見かけません。

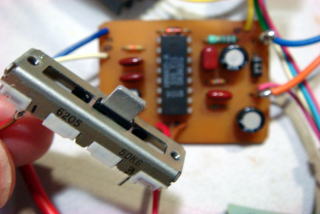
速度制御にはテープレコーダの速度制御用ICを使っています。PWM制御をしています。今でも手に入るかは??です
このボリュームをドライバのスタートレバーに仕組んでやれば今風の動きをします。
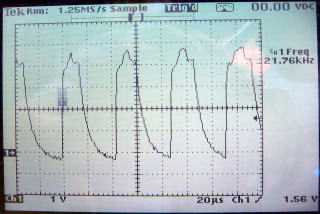
一番速度が遅い時の、FETゲート波形。電圧軸:1V/div、時間軸20uS/div。ちょっとドライブが弱いかな?後で直しておきましょう。
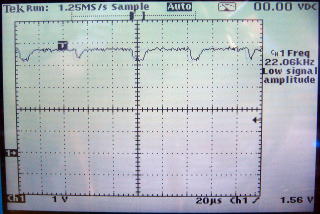
一番速度が早い時の、FETゲート波形。電圧軸:
1V/div、時間軸20uS/div
この回路は、速度ボリュームの設定値とエンコーダ出力のフィードバックにより、PWM制御しており、トルクが掛かり回転数が低下するとパルス幅が右の波形の様にDCに近づきます。 言い換えると、トルク補償をしているのです!

速度制御基板より、誤動作防止用リレーを介し、FETに配線されております。使用しているモータは始動時に100Ap近くの短い時間での電流が流れます。それらに耐え、かつ連続動作時の熱を抑えるため、
できるだけON抵抗の小さなFETを選択します。それにより放熱器を小さくすることができます。右の写真は約20mΩのON抵抗のFETです。今手持ちがないのですがいずれ2mΩのON抵抗FETに変える予定です。
動作状態によってはFETの並列接続も考えております。
いずれにせよ、小型にする事を目標においています。FETのパッケージも今では色々なものがあります。
左の写真はトルク検出した時だけにブレーキ動作するFETです。左下に空中配線された部品ありますが、これが重要な役割をする部品です。正体はコンデンサーです。
どのように動作するかはご一報頂ければ、お教え致します。
上のドライブ用のFETとは、同時にONしない様、いくつかの工夫が施されております。
使用しているFETはドライブ用のものと同じものです。最初の全体像を見られたと思いますが、
実際の配線は可能な限り短くする予定でいます。L成分を気にしております。
電動ドライバーの世界は、家庭では充電器用ドライバーがホームセンターなどに展示されており、持っている人が結構おられると思います。(実は・・・(;^ω^A テレテレ・・・何を隠そう私も電動ドライバーは5本ほどあります。
えっ!そんなに持って何するの!って?)日曜大工などで利用していると思いますが、殆どのドライバーはトルク管理ができない仕様になっています。
一方、工場などで使用されているドライバーは、トルク管理がきっちりとされております。その理由は、
規定のトルクになると、ブレーキがかかり停止する仕組みになっているドライバーを使っているからです。本来のドライバーとはこう言うものをさします。トルク管理しなくて良い作業もありますが、ロボットなどに搭載されている電動ドライバーはそうは行きません。
例えばHDDに見られる様な多層基板などを金属ボディーに取り付ける時、締め過ぎると基板の層内のパターン割れ事故を起こします。また、市販されている電動ドライバーは設定トルクになっても回り続け、「カタッカタッカタッ」とインパクトされてしまい、
本来の締め付けトルクよりさらに強く締められてしまいます。最悪は部材を壊し、ネジが空回りするトラブルを招きます。きっと恐らく経験されている方がおられることでしょう!(はい!私もあります!・・(w_-;ウゥ・・・)
有名どころのメーカーを、1社だけあげておきます。
㈱ハイオス ホームページ http://www.hios.com/
![]()
この会社は、なんとブラシレスドライバーを開発されており、恐らく世界でのシェアも、かなりなものがあり、テレビでも良く見かけます。また、ネジの開発もやられており、社長さんの特許も数百件と聞いております。ロボット搭載用のドライバーも開発されておりますので、
ぜひ覗かれてみることをお勧め致します。